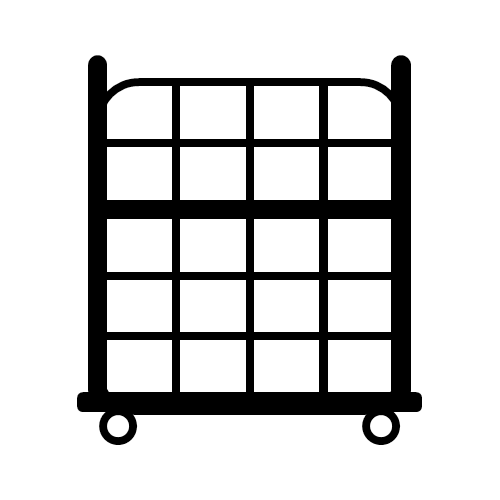
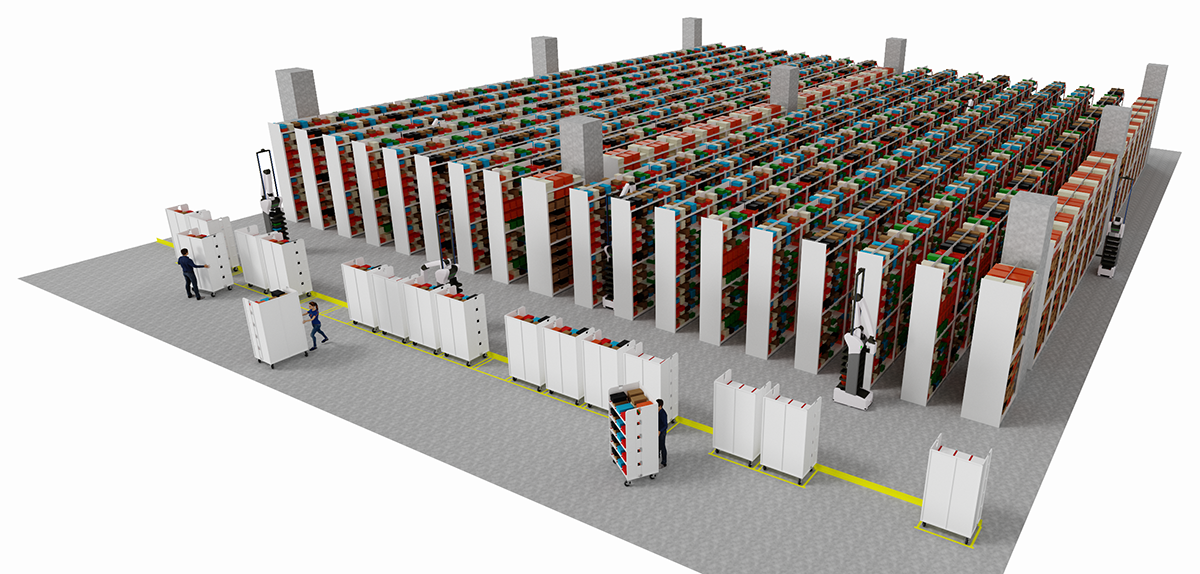
Torobo GTCが行うタスク
お客様のWMS(Warehouse Management System)と連携し、ロボットが自動的に以下の作業を実施します。
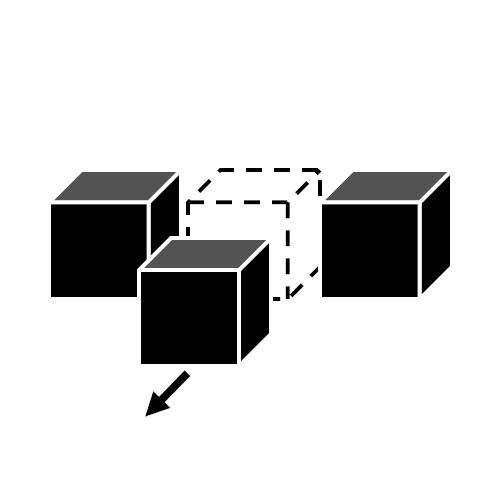
- 商品補充:商品をカゴ車等から取り出し棚に格納
- 作業者は商品が入ったカゴ車を所定の位置に設置します。
- ロボットは商品をカゴ車からピックした後、運搬し、棚に補充します。
- 商品出荷:商品を棚から取り出しカゴ車等に格納
- ロボットは指定された出荷単位/バッチ単位に商品をカゴ車に振り分けて積載します。
- ピックが完了したカゴ車は作業者が次の工程に運びます。
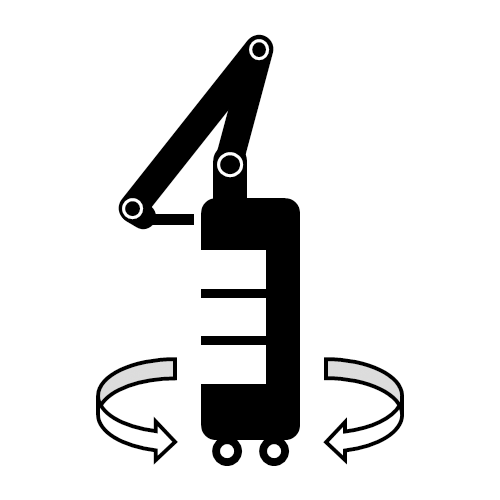
- 棚卸し
- 定期棚卸しや循環棚卸しなど、ご要望に応じて対応いたします。
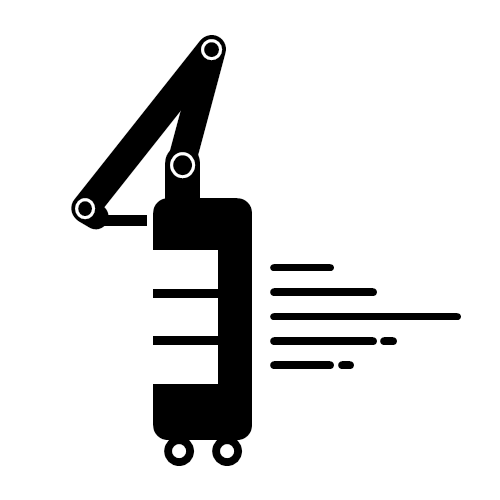
ハンドリング可能な対象物
まずは以下のような箱類にフォーカスしていますが、今後、箱類以外の物品を扱うことも検討していきます。
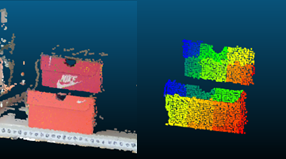
- 靴箱
- 箱入れされた家電
- 箱入れされた工業部品
- カートン全般