特徴
人間と同等のサイズと力
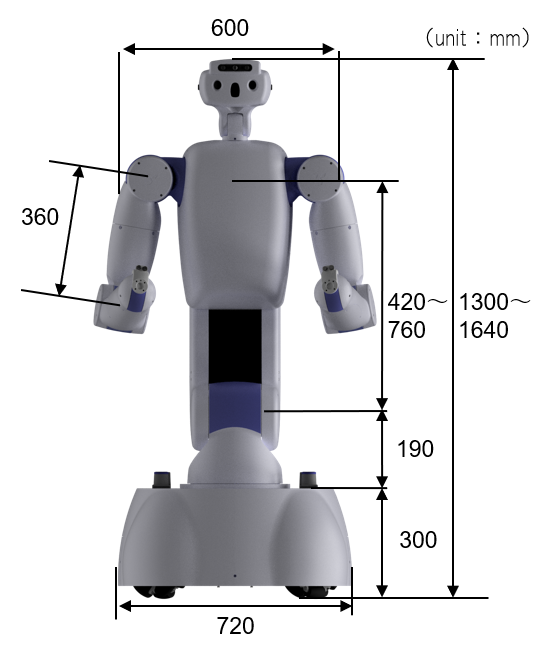
身長1300~1640mm(可変)、リーチ740mm、台車幅720mmと人に近いサイズで、片腕の可搬重量が最悪姿勢の保持で6kgと十分な力が出せるため、様々なアプリケーションの開発に用いることが可能です。
多種多様な作業に十分な関節構成
腕7軸×2本、腰3軸(ヨー・ピッチ・昇降)、首2軸(ヨー・ピッチ)、足回り4軸(全方位移動台車)の関節構成により、人間の生活空間・作業空間において人に近い可動域で作業ができます。
腕部と腰部のインピーダンス制御
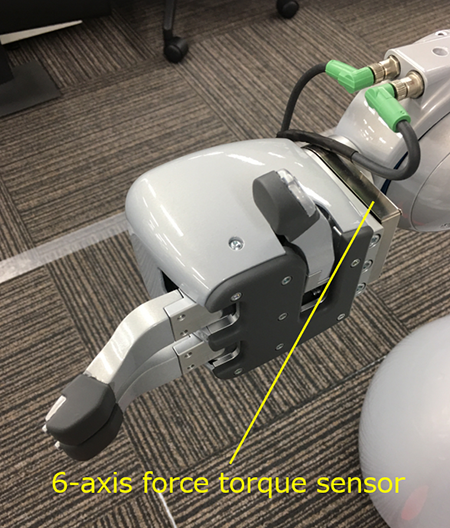
腕部と腰部に関節外乱オブザーバを採用することによりトルクセンサレスで外力検知が可能で、接触停止や関節柔軟性を実現できます。
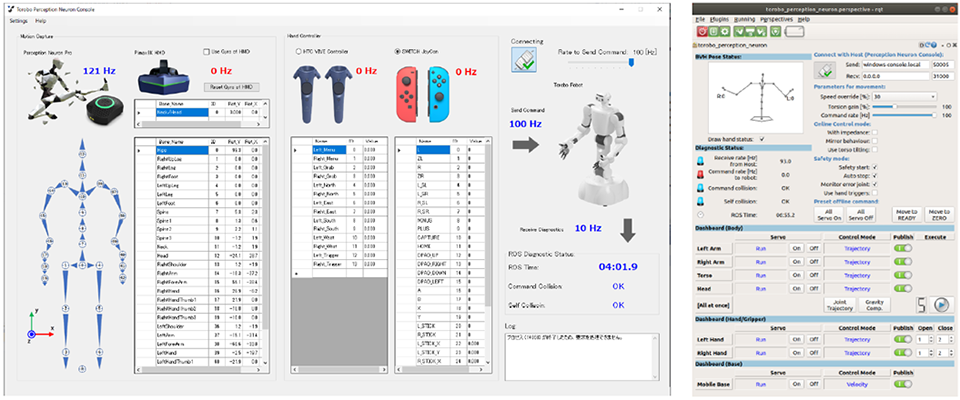
ROS対応
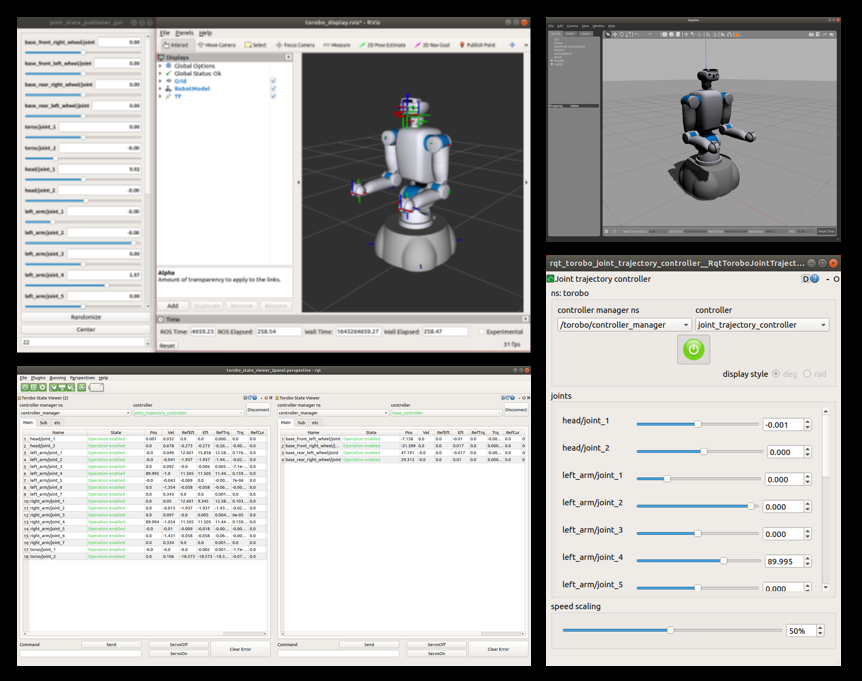
ROSに対応しているため、ROSのシミュレータであるGazebo内のロボットと実機を同じプログラムを用いて動作させることができます。これによりロボットの動作を安全に検証することが可能です。また、軌道計画や自己干渉判定に関しては、MoveIt!の機能を用いて標準で実装されています。