Humanoid Robot
Torobo
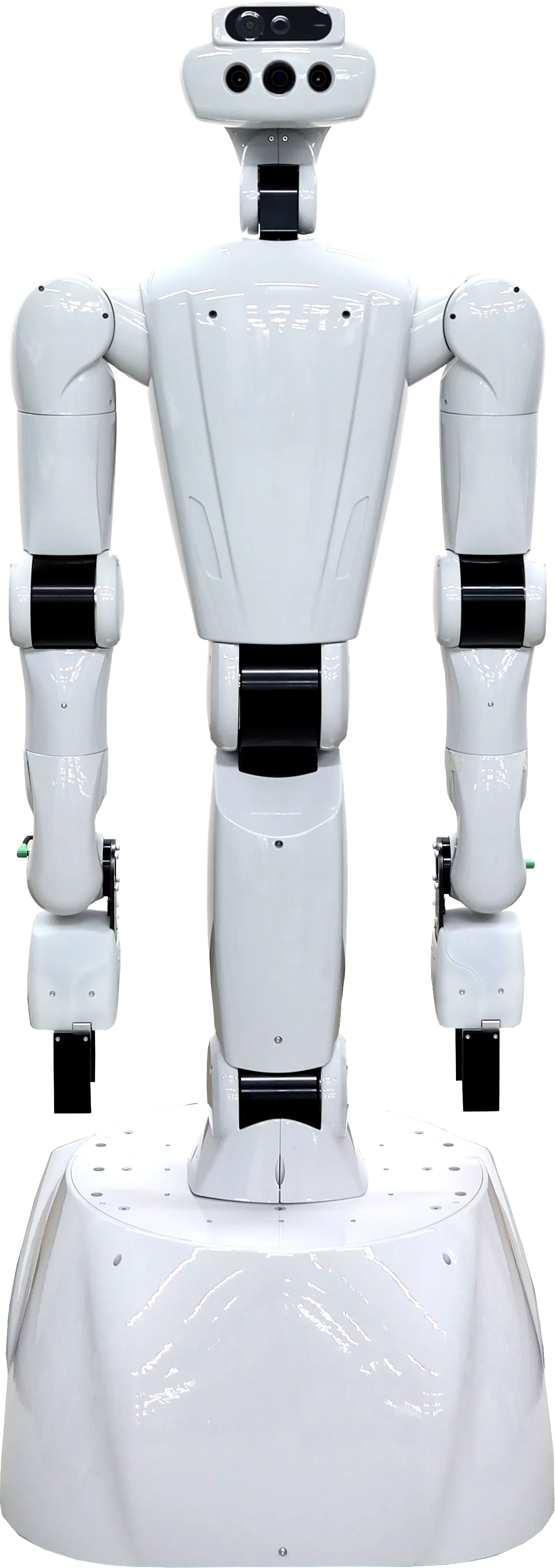
Toroboは次の特徴を有しており、環境や対象物と積極的な接触を伴うタスクの自動化や、機械学習の応用研究などに活用できます。
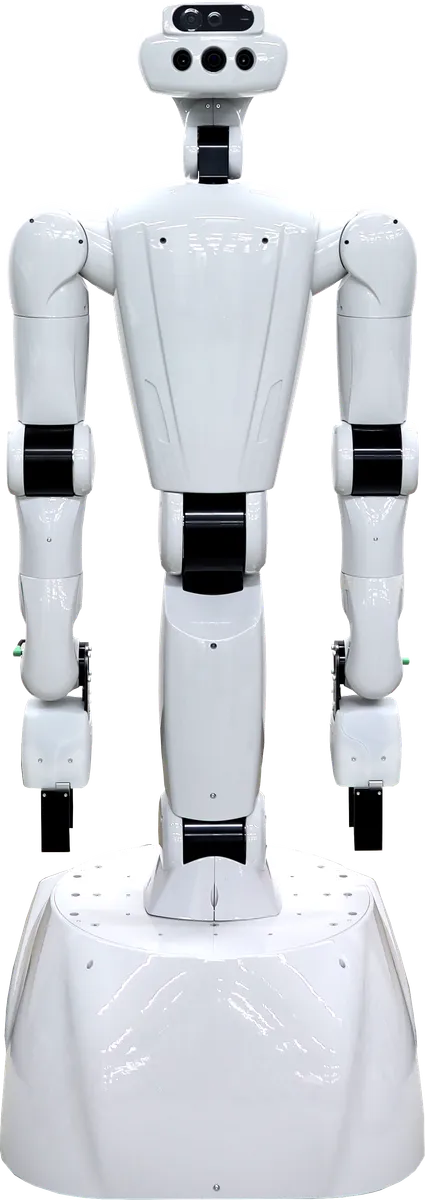
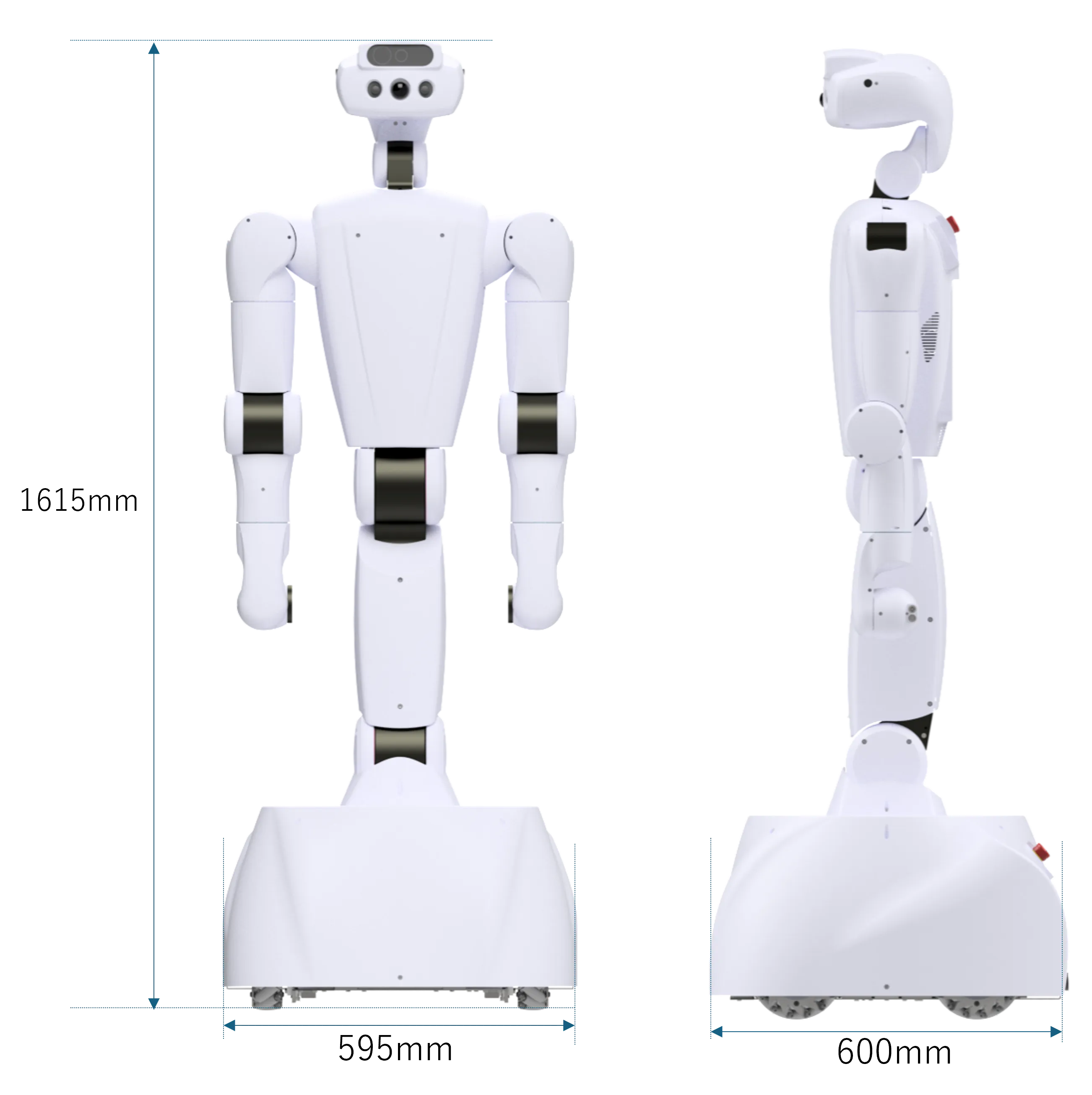
人間と同等のサイズと力
身長1615mm、台車幅590mmと人に近いサイズで、片腕の可搬重量が最悪姿勢保の保持で7kgと十分な力が出せるため、人の作業を代替するようなロボットの研究開発が可能です。
多種多様な作業に十分な関節構成
腕7軸×2本、腰3軸(ピッチ・ピッチ・ヨー)、首3軸(ヨー・ピッチ・ロール)、足回り4軸(全方位移動台車)の関節構成により、人間の生活空間・作業空間において人に近い可動域で作業ができます。
腕部と腰部のトルクセンシングとインピーダンス制御
腕部と腰部の全関節にトルクセンサを備え、関節単位のトルクフィードバック制御により、力を調整しての作業や安全な接触停止が可能です。組立作業や料理、人間との物理的インタラクションなどをより安全かつ巧みに実行することができます。
ROS対応
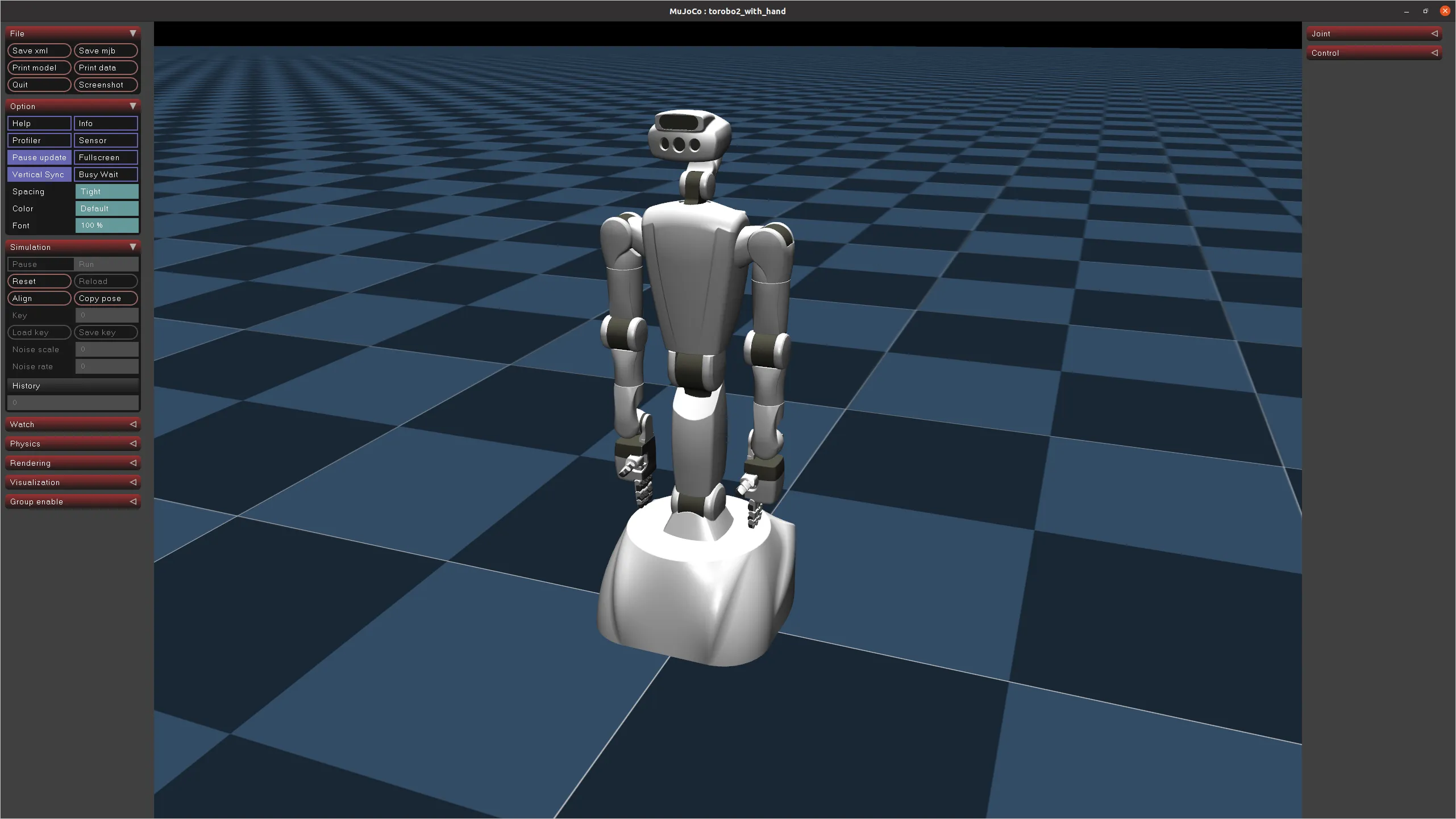
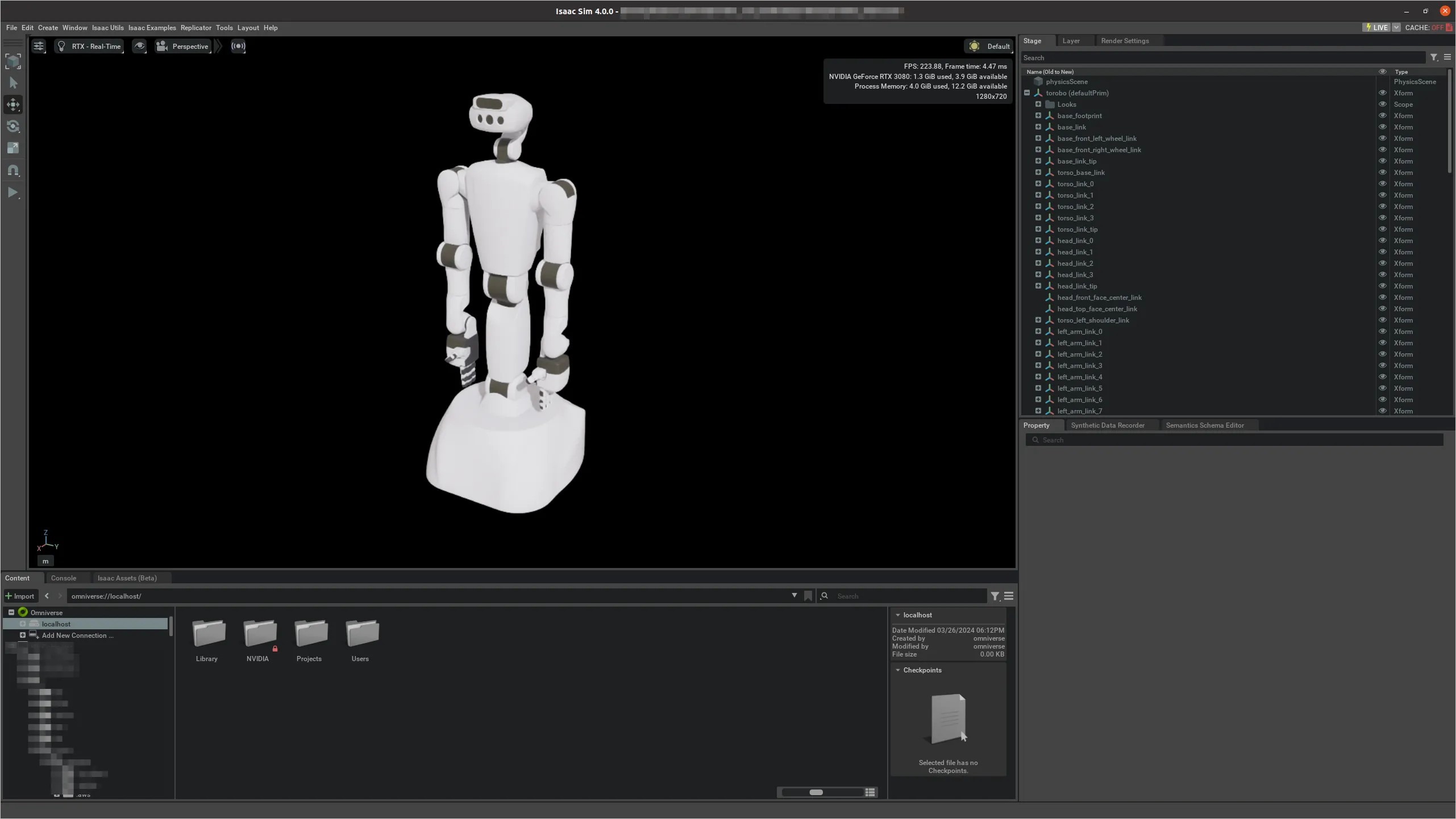
ROSに対応しているため、ROSのシミュレータであるGazebo内のロボットと実機を同じプログラムを用いて動作させることができます。これによりロボットの動作を安全に検証することが可能です。また、軌道計画や自己干渉判定に関しては、MoveIt!の機能を用いて標準で実装されています。
基本性能
Toroboの基本性能を示す動画です。※2:20以降のダイレクトティーチングは、自社内での研究開発のため基本パッケージに含まれていません。※動画は旧Toroboによる動画になります。
投球動作
新型toroboは旧toroboより軽量であるため、より速いモーションを実行することが可能です。
| 仕様 | 詳細 |
|---|---|
| Sensors (optional head) |
Wide-angle stereo camera x 1 Fisheye camera x 1 Depth camera x 1 Stereo microphone x 1 |
| Effectors (optinal head) | Speaker x 1 |
| Height | 1615 mm |
| Weight | approx. 120 kg |
| Payload |
Worst posture: 7 kg (single arm) |
| External terminals (back of the robot) |
Digital input x 8 Digital output x 8 Analog input: x 8 Analog output x 8 Ethernet x 2 |
| Tool flange (tip of the arm) |
24V DC power supply terminal x 1 General-purpose signal wire x 8 |
| Onboard computer(optional) | A single PC is standardly equipped and is used for controlling the robot. Additionally, it is possible to install a second optional PC with Nvidia RTX 4070. The second PC is used for controlling the sensors in the head. |
| Head(optional) | Head is optionl part. you can choose the head from 2 types. |
| End-effector(optional) | End-effector is optionl part. you can choose the end-effector from hand or gripper. |
| Power source | Built-in battery (continuous operation while charging is also possible) |
| Battery continuous operation time | Up to approx. 3 hours |
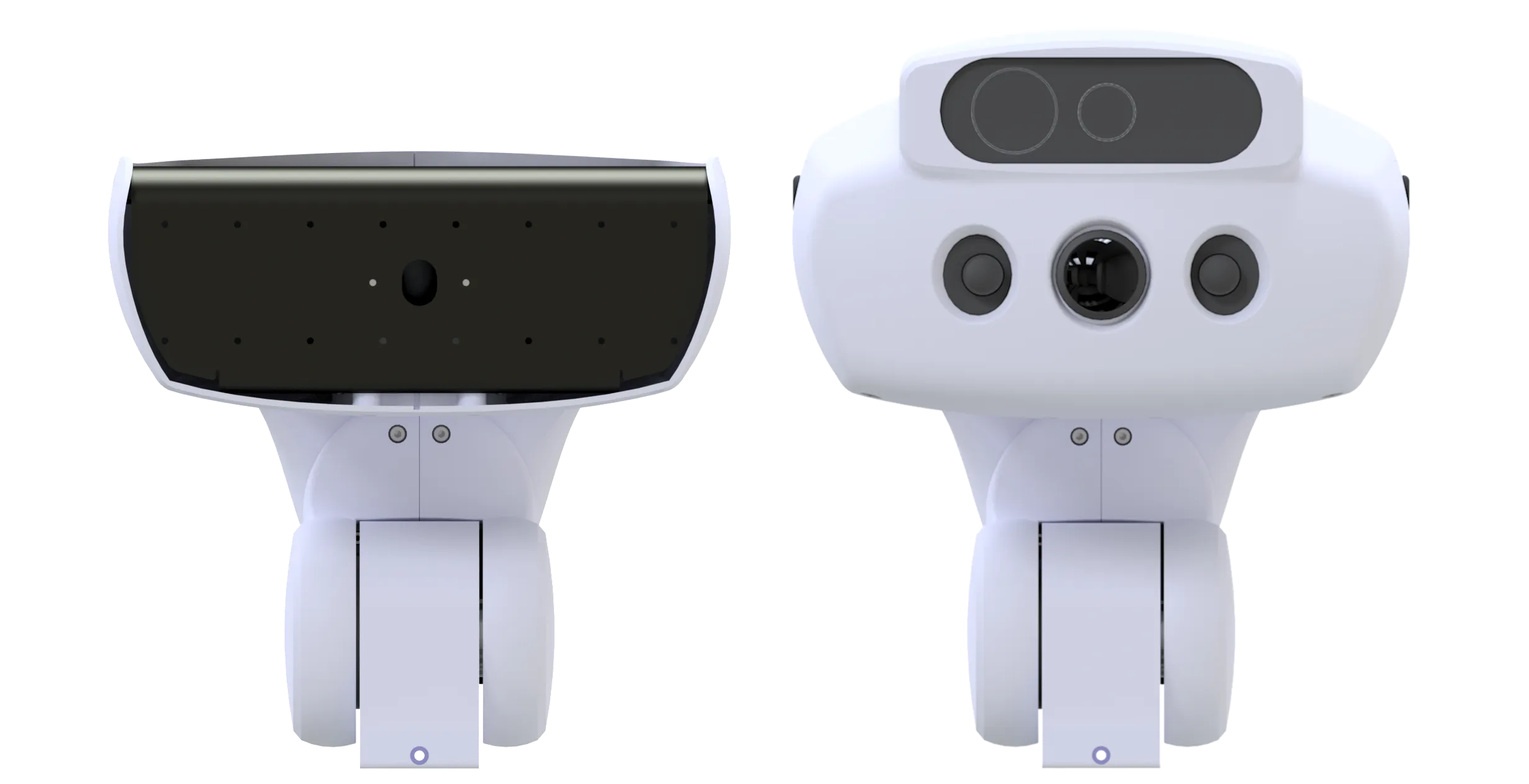
頭部 (option)
頭部はオプションであり、2種類から選択することができます。1つ目は、センサが取り付けられていないタイプであり、こちらのタイプがデフォルトのタイプとなります。2つ目は、いくつかのセンサ及び出力装置が搭載されているタイプとなります。搭載されているセンサは、ToF方式のデプスカメラ、魚眼カメラ、ステレオ構成の広角カメラ、マイクとなります。それぞれのカメラではRGB画像を取得することが可能です。また出力装置としてスピーカが搭載されています。さらに詳細な情報については、弊社のメールアドレスにお問い合わせ下さい。
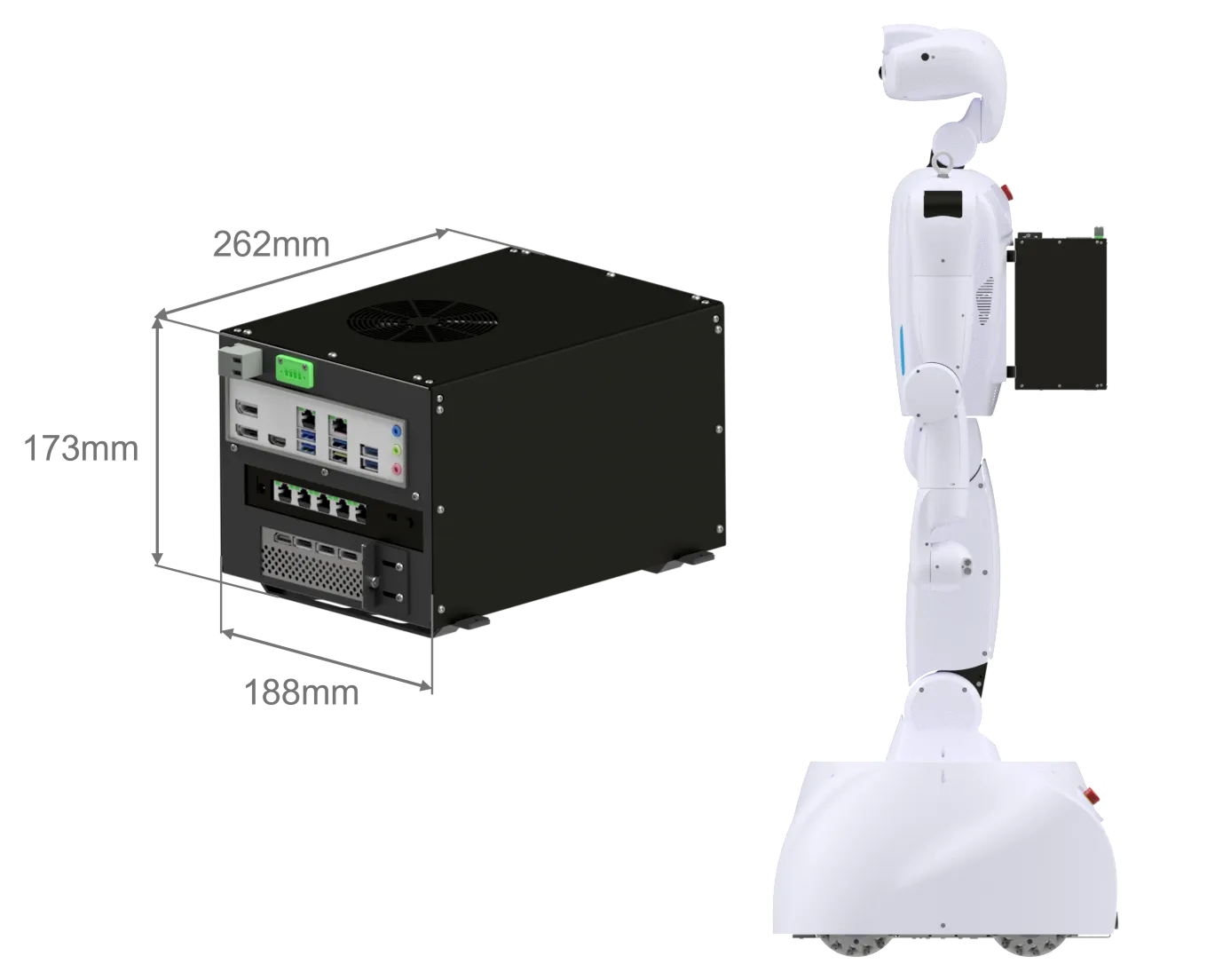
画像処理用PC (option)
画像処理用PCは、頭部に搭載されているセンサ類の制御を行うPCです。また、Nvidia RTX 5070が搭載されており、こちらのPCで学習モデルのTrainingやInferenceを実行することが可能です。詳細な情報については、弊社のメールアドレスにお問い合わせ下さい。
エンドエフェクタ (option)
エンドエフェクタはオプションの部品です。エンドエフェクタとしてグリッパを搭載することが可能です。本グリッパは、自社製品であり、電流制限による把持力制御やバックドライバブル機能を備えています。さらに詳細な情報については、弊社のメールアドレスにお問い合わせ下さい。
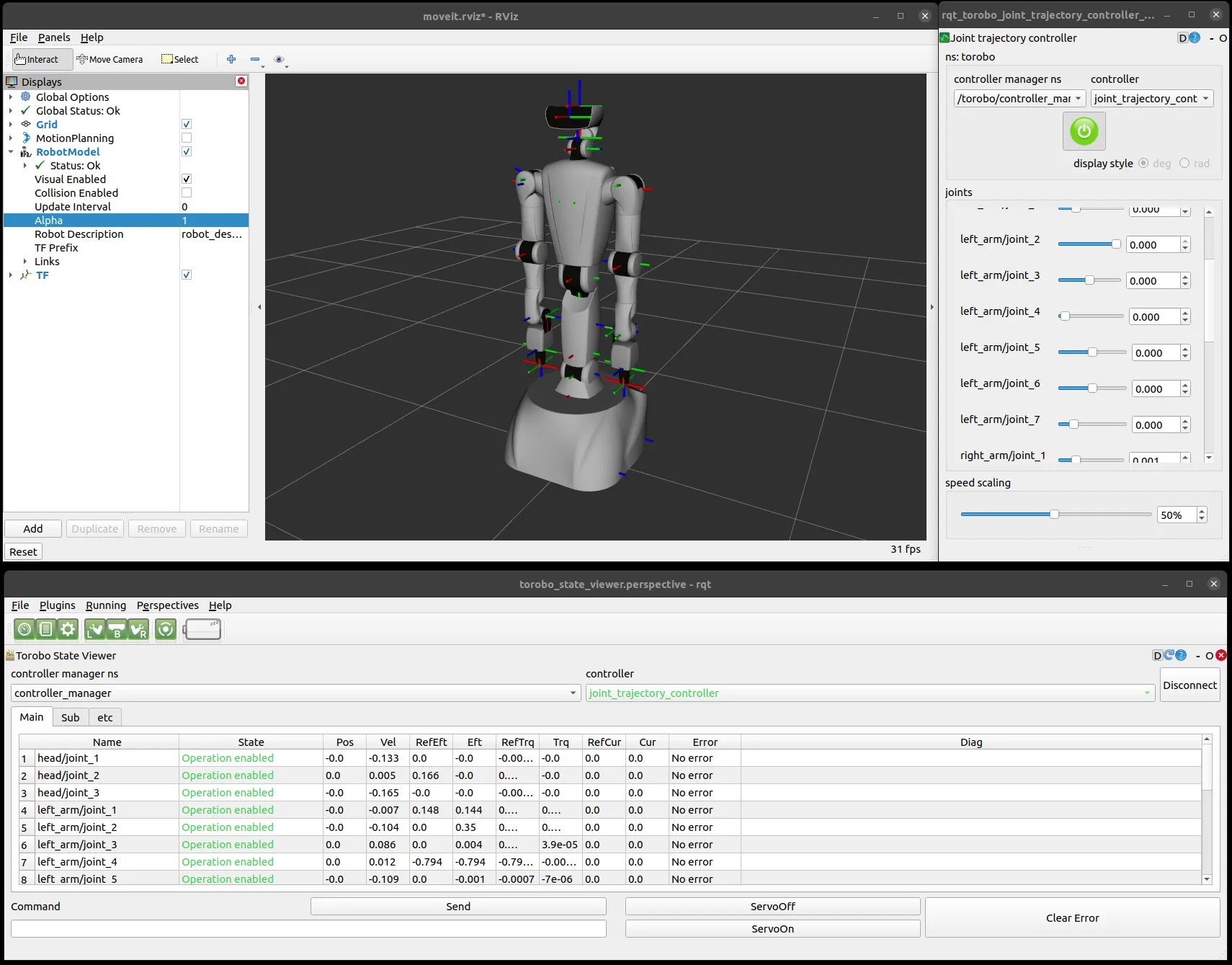
ソフトウェア
力制御可能な人型ロボットの動作に必要な基本的な機能が予め実装されています。手先直交座標系におけるインピーダンス制御、ZMPを監視しての転倒防止機能、複数の動作を連結するためのステートマシン、干渉判定に基づく安全停止などを活用することができます。 ToroboのソフトウェアはROSをベースに作成されています。 そのため、上記の機能を容易に使用できることに加え、RVizでの状態可視化、ROS標準のソフトウェアであるMoveIt!を用いた軌道計画、ロボットのセンサ情報(カメラ画像、関節角度、関節トルク等)のログ取得や保存が可能です。