






Toward Coexistence with Robots
東京ロボティクスは、単純労働や危険作業をロボットに任せることで、人間が知性と感性を生かせる仕事に専念できる世界を目指します。
OUR MISSION
ロボットの適用分野を拡大し、より多くの人間を労働から解放する
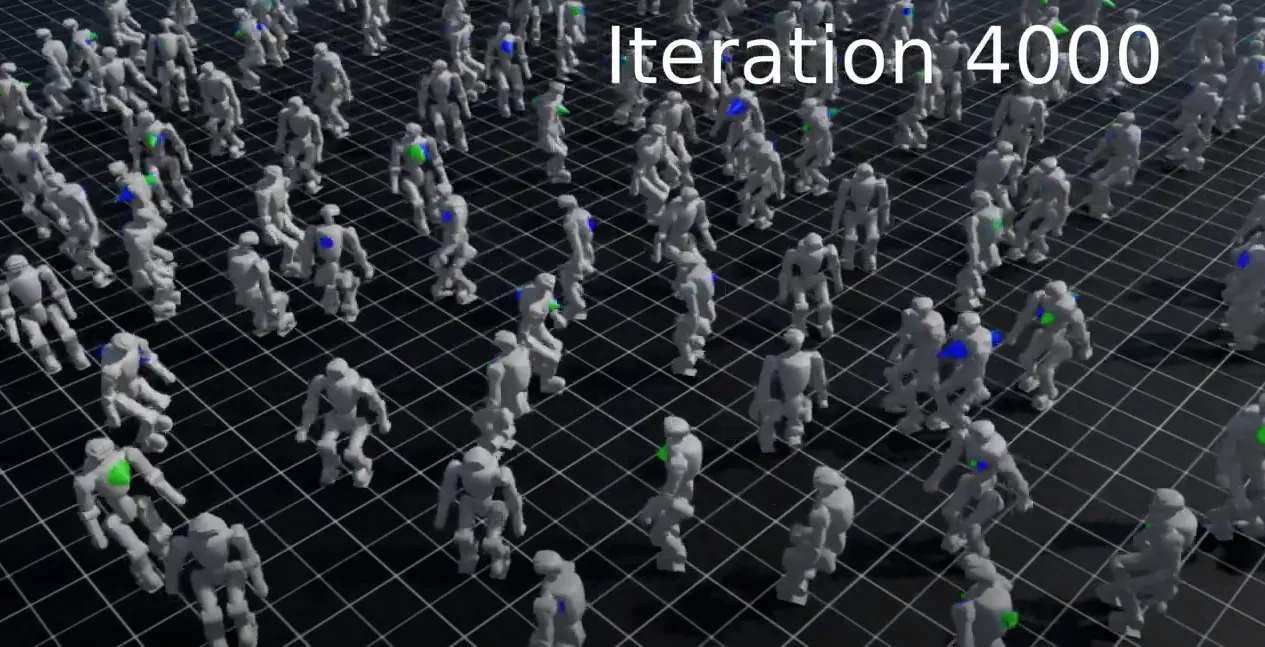
我々は、未知のニーズに対して最新のロボット技術を適用することで、これまでにない新しいアプリケーションを創出します。究極的には、様々な作業をプログラムせずに実行可能な汎用ロボットを実現し、より多くの現場への導入を目指します。
OUR SIGNATURE ROBOT
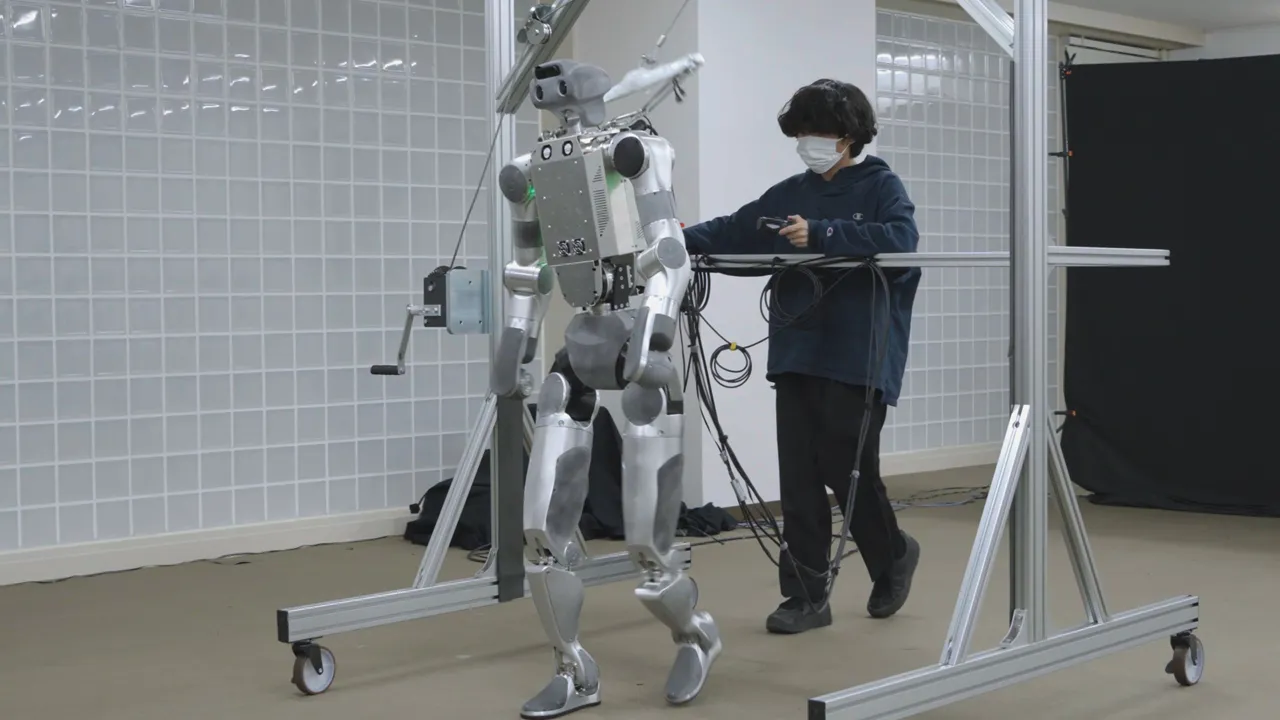
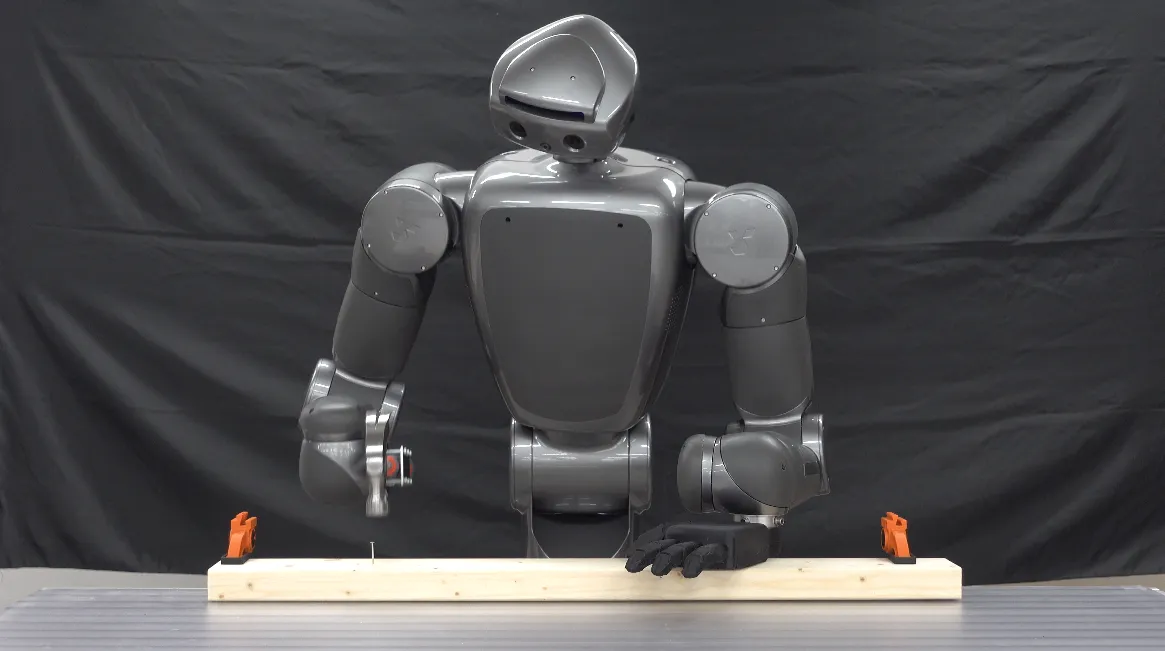
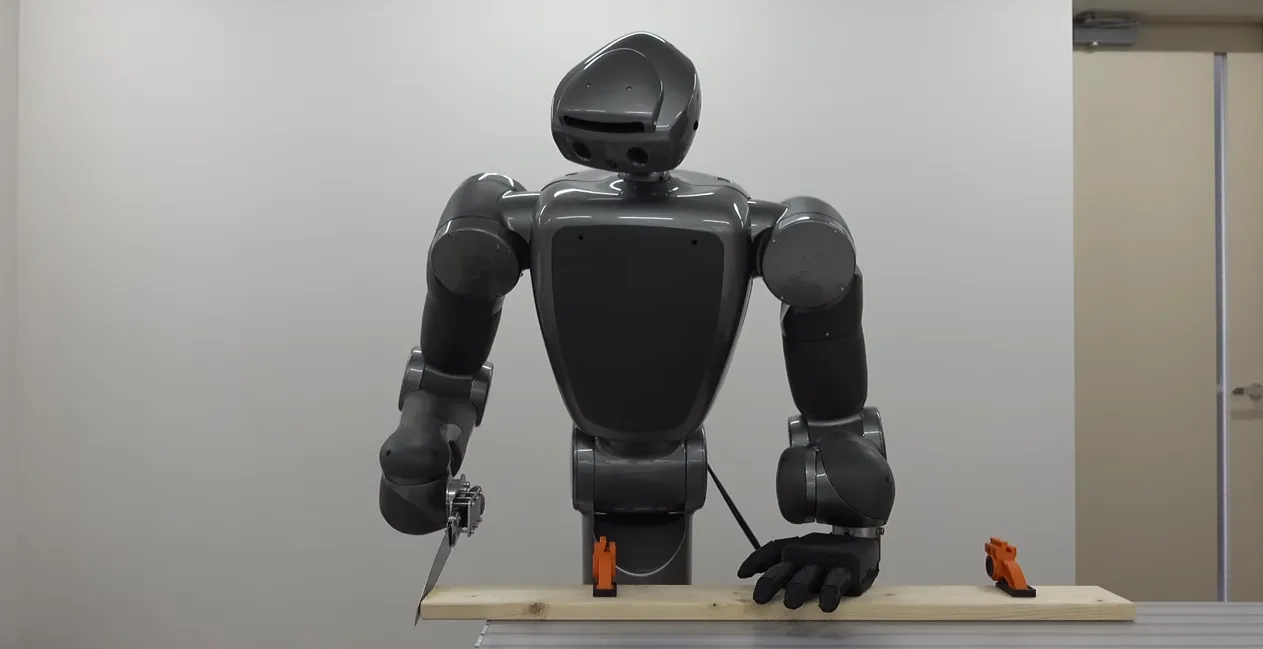
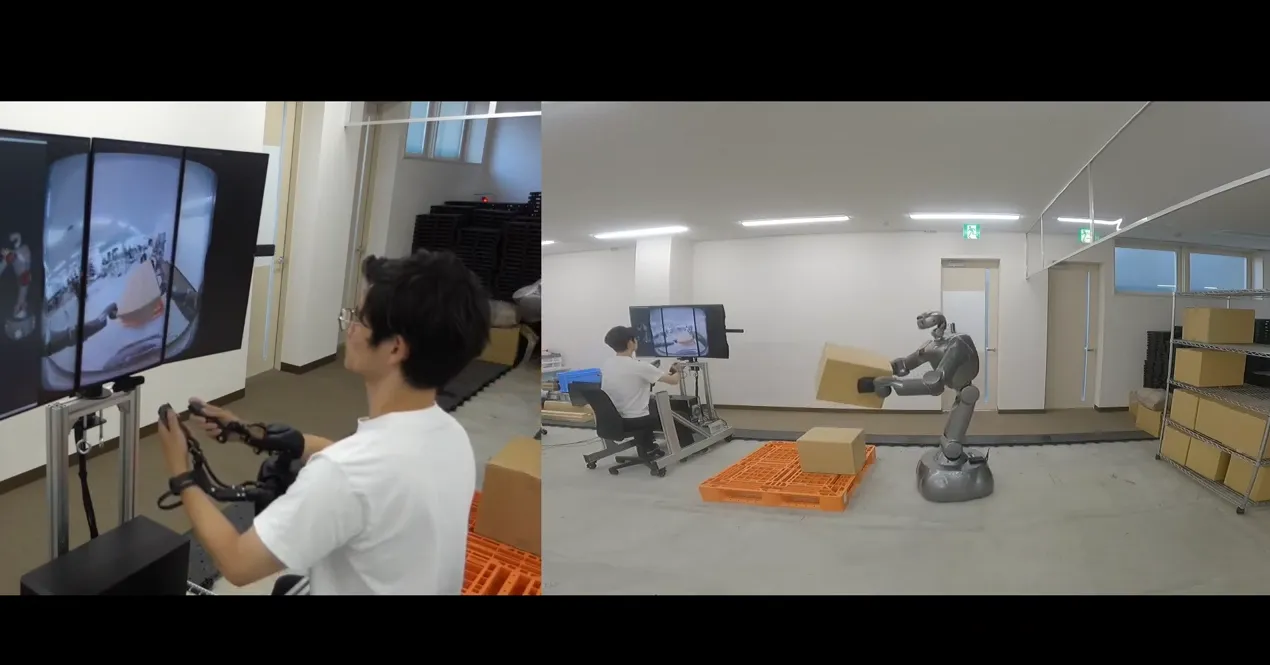
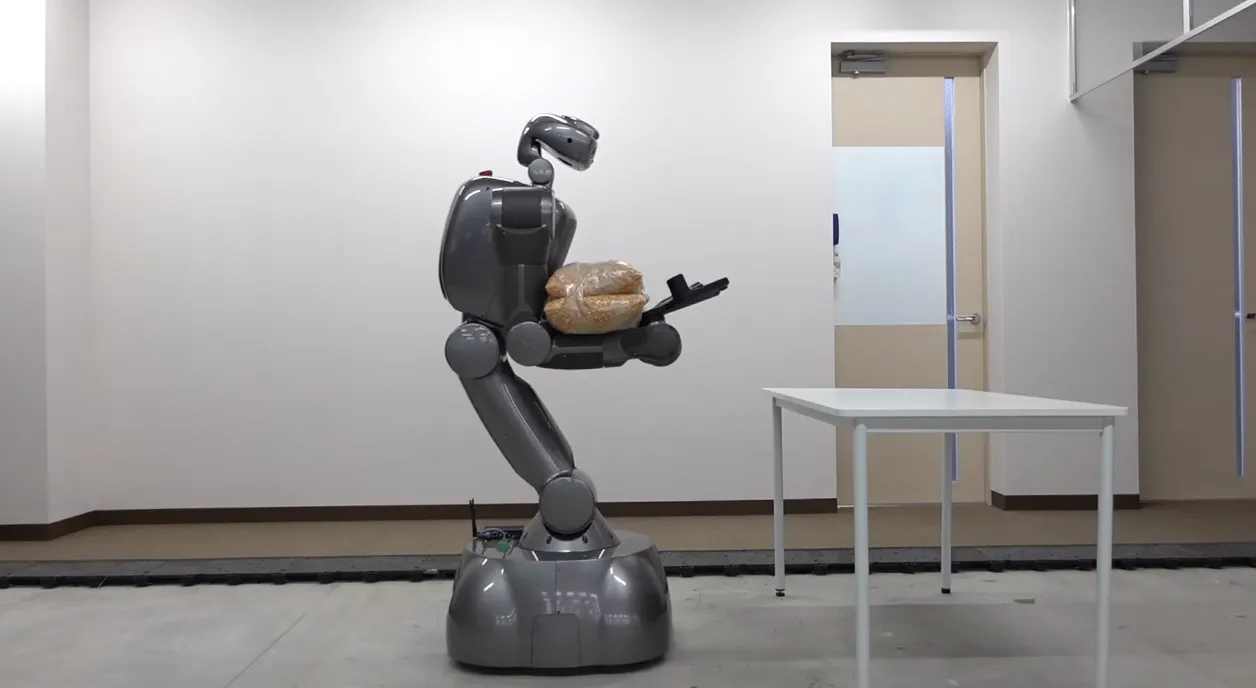
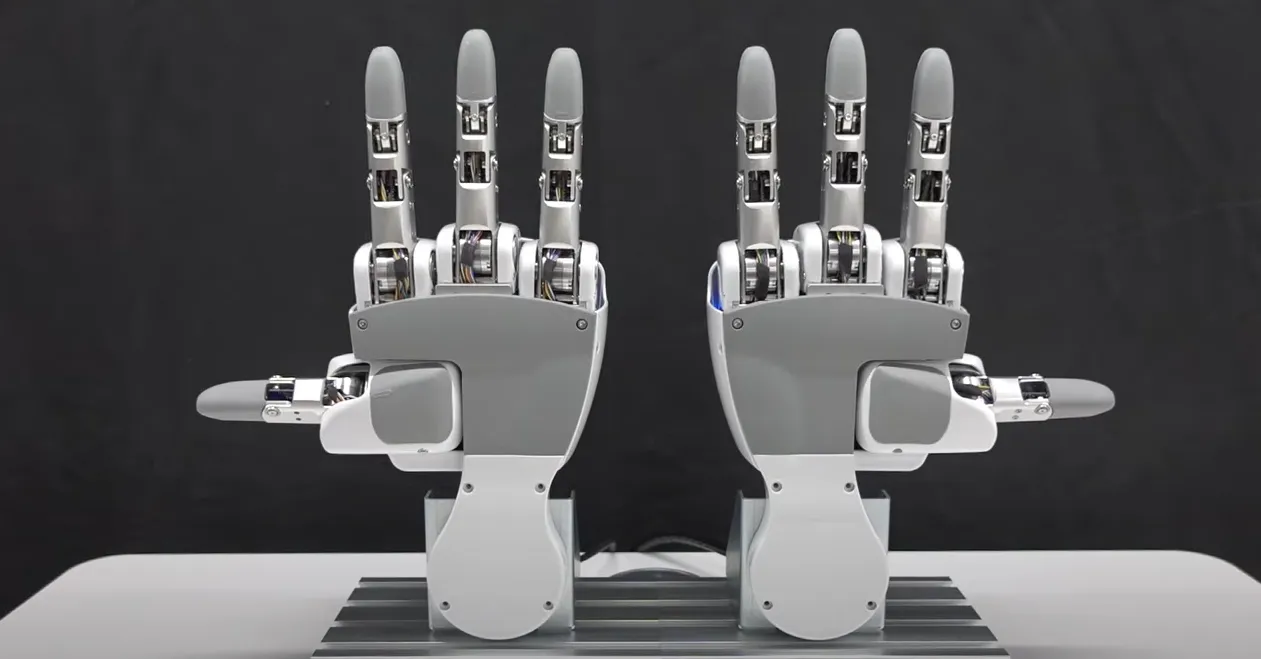
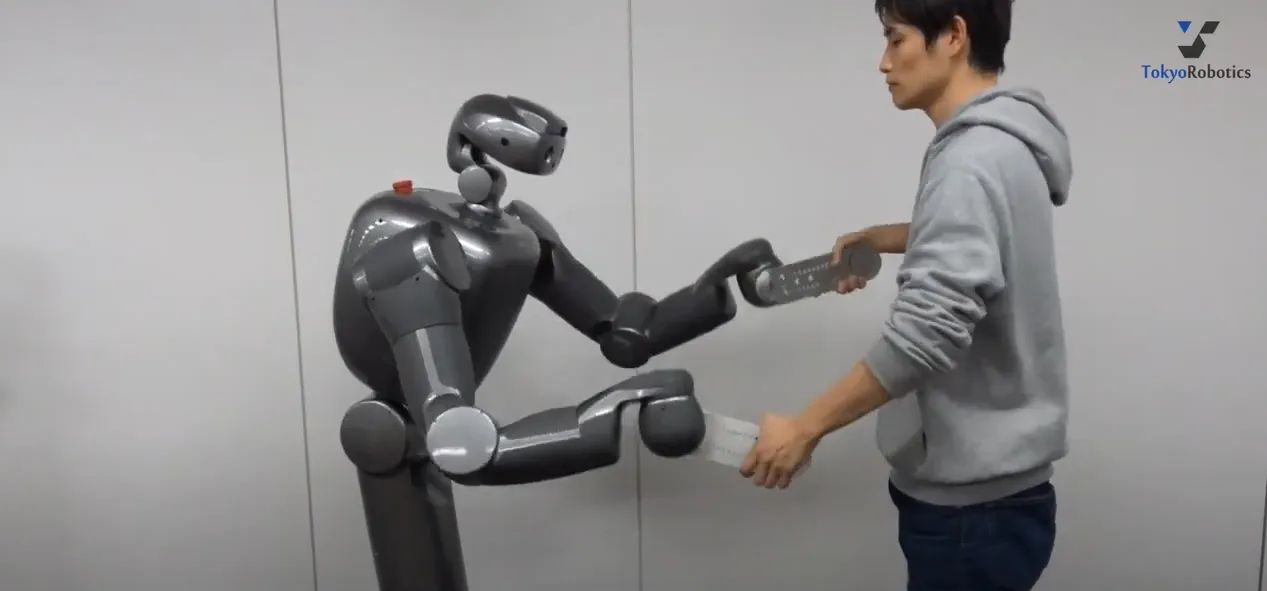
Torobo
Toroboは、製造業、物流業、サービス業など、さまざまな分野での活用を想定したヒューマノイドロボットです。 高性能な力制御技術と全身制御技術を用いることで、安全かつ巧みに作業をすることができます。

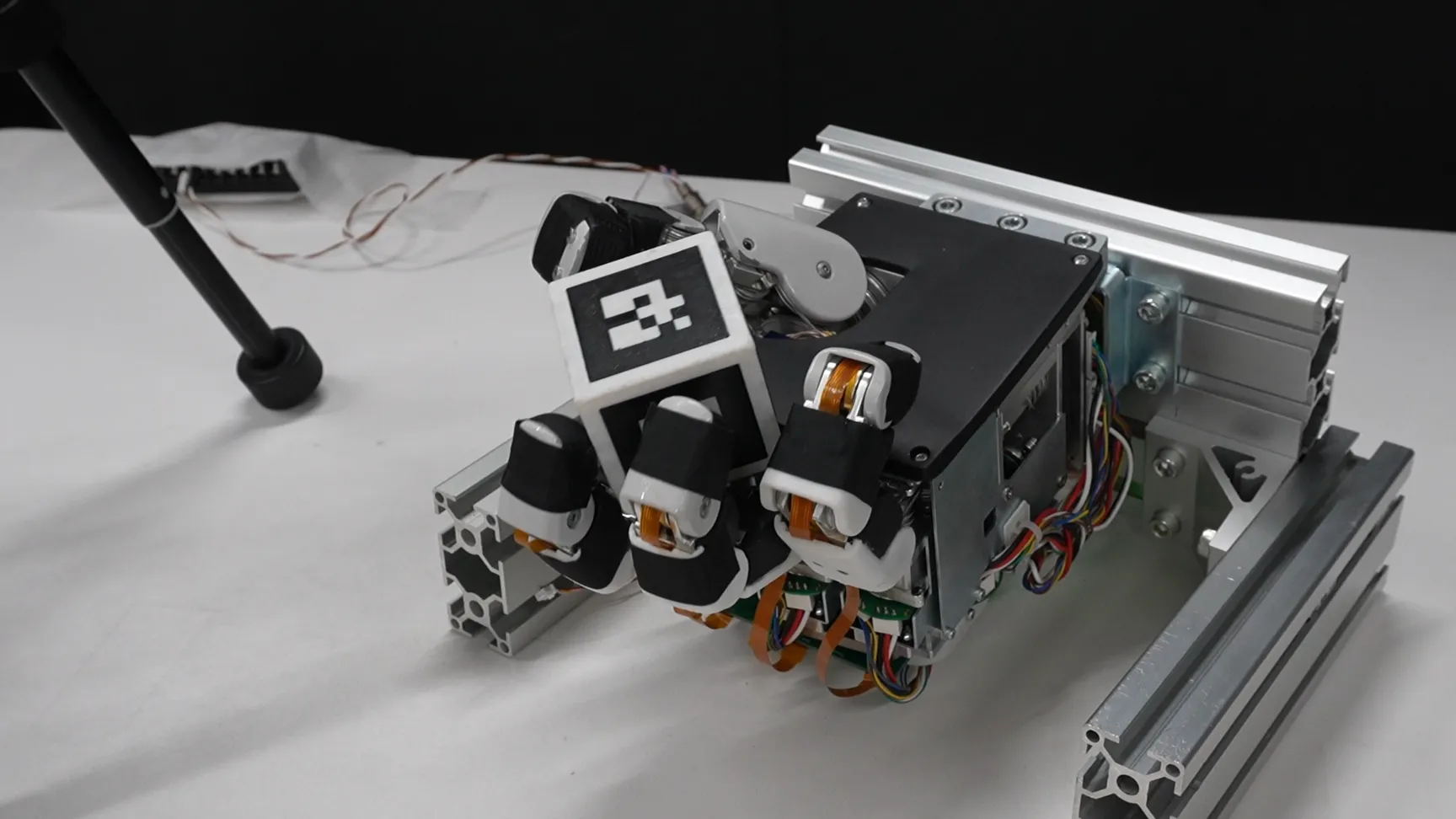
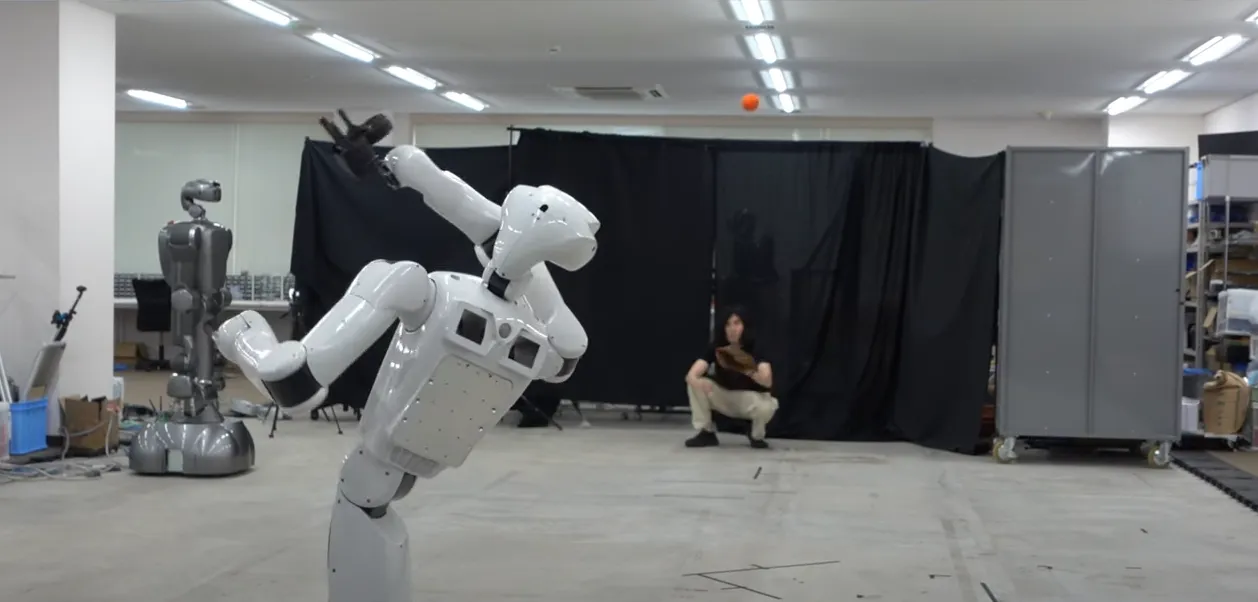
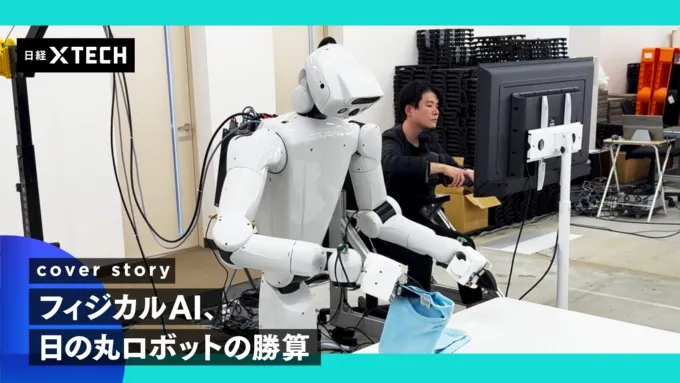
我々のロボットは様々なタスクを実行することが可能です
News


Management

坂本 義弘 (Ph.D.)
創業者、代表取締役CEO
早稲田大学理工学研究科機械工学専攻修了。博士(工学)。専門はロボット工学と測位技術。これまで、大学の研究者・フリーランスエンジニアとして、組み込み系開発から高周波回路設計、ロボット開発、Web・DBシステム開発、Windowsアプリ開発、サーバインフラ構築、データ分析など、様々な業務を経験。現在はロボット技術のビジネス化に興味を持っている。早稲田大学次世代ロボット研究機構 招聘研究員。歴史好き。
有江 浩明 (Ph.D.)
取締役CTO
早稲田大学理工学研究科機械工学専攻修了。博士(工学)。修了後は独立行政法人理化学研究所・早稲田大学で、ニューラルネットワークとロボットを使い人の認知的能力をモデル化して理解する認知ロボティクスの研究に従事。その後、株式会社デンソーでAIを活用した自動運転技術の開発、株式会社ALBERTでは事業への応用を目指した強化学習の研究開発を行う。趣味はスポーツ全般。
Advisers
菅野 重樹 教授
技術顧問
早稲田大学創造理工学部総合機械工学科 教授(理工学術院長)。日本機械学会、IEEE、日本ロボット学会、および計測自動制御学会フェロー。国際会議の実行委員・委員長、学会の理事・会長を数多く歴任。ロボット工学の分野で500以上の学術論文と20以上の特許を保有している。バイオメカニズムの視点から見直した人間機械系を、人間共存ロボット、人間ロボットコミュニケーション、知的生産システムなどに適用することに興味がある。2007年には、人間と同じ生活空間で、人間の生活を助けるロボットの実現を目指し作業性と安全性を追求したロボット「TWENDY-ONE」を発表し、世界的に高く評価されている。