| Sensors (head) |
|
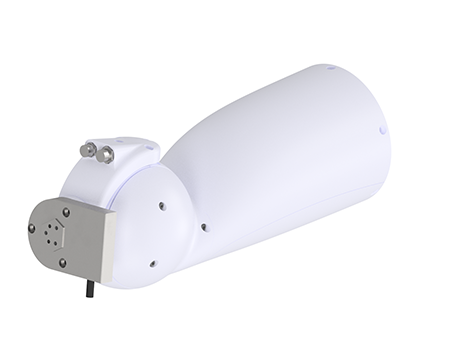
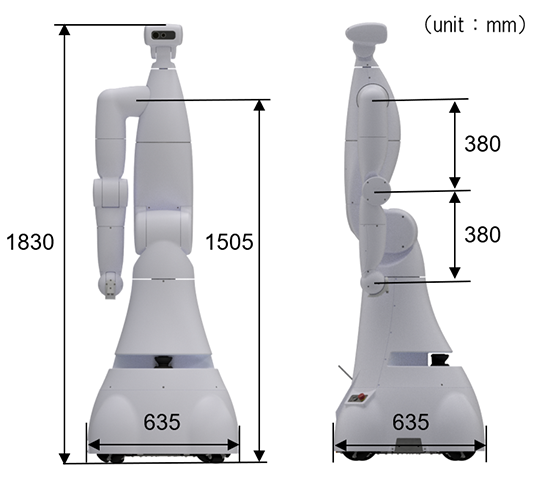
| Height |
1830 mm |
| Weight |
approx. 145 kg |
| Payload |
Worst posture: 6 kg
|
| External terminals (back of the robot) |
- Digital input x 8
- Digital output x 8
- Analog input: x 8
- Analog output x 8
- Power supply for external equipment: 5V-DC/2A, 12V-DC/1A, 24V-DC/1A
- Ethernet x 1
- USB 3.0 x 2
- HDMI output x 2
- Charger connection terminal
|
| Tool flange (tip of the arm) |
- 24V DC power supply terminal x 1
- General-purpose signal wire x 8
|
| Onboard computer |
- PC for robot control
- PC for image acquisition, etc.
|
| Power source |
Built-in battery (continuous operation while charging is also possible) |
| Battery continuous operation time |
Up to approx. 3 ~ 4 hours |
寸法
姿勢

ソフトウェア
アプリケーション開発に必要な基本的な機能が予め実装されています。
関節インピーダンス制御、ZMPを監視しての転倒防止機能、複数の動作を連結するためのステートマシン、干渉判定に基づく安全停止などを活用することができます。
TolonのソフトウェアはROSをベースに作成されています。
そのため、上記の機能を容易に使用できることに加え、RVizでの状態可視化、ROS標準のソフトウェアであるMoveIt!を用いた軌道計画、ロボットのセンサ情報(カメラ画像、関節角度、関節トルク等)のログ取得や保存が可能です。