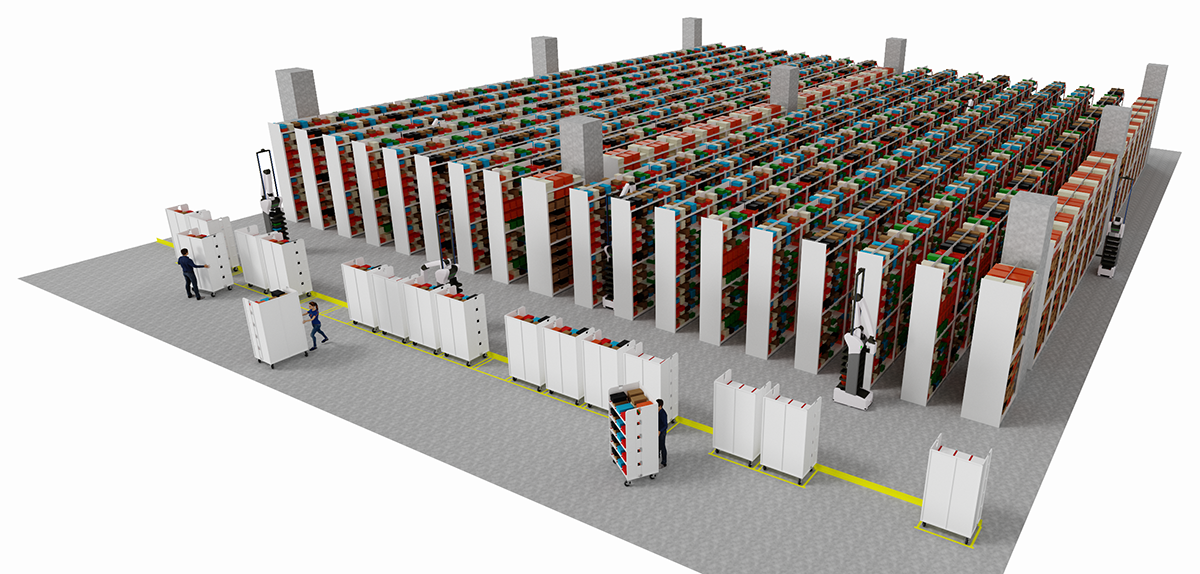
Tasks performed by Torobo GTC
By integrating with the customer's Warehouse Management System (WMS), the robots automatically carry out the following tasks:
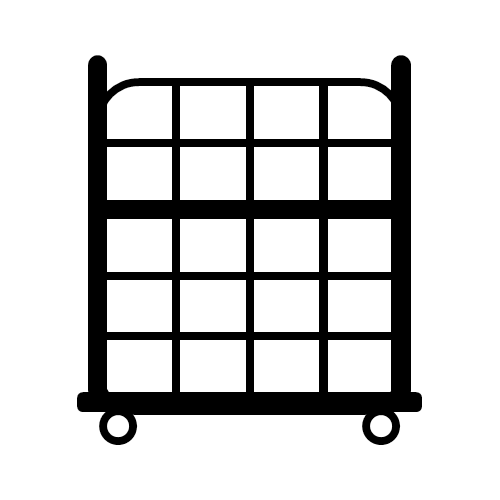
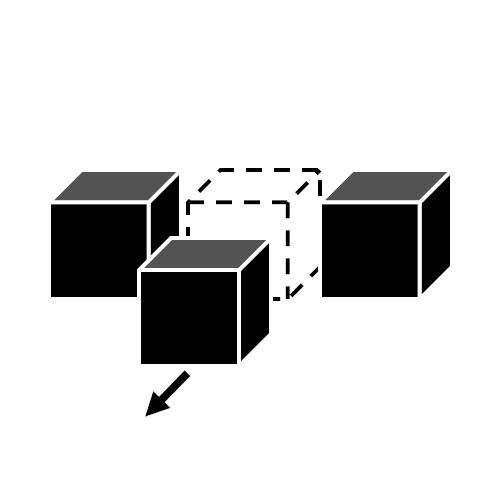
- Goods replenishment: Taking goods from cage carts or similar and storing them on shelves.
- The workers place the cage carts filled with goods at the designated locations.
- The robots pick the goods from the cage carts, transport them, and replenish the shelves.
- Goods shipping: Taking goods from the shelves and loading them in cage carts or similar.
- The robots load goods into cage carts according to the specified shipping units/batch units.
- Once picking is complete, the workers transport the cage carts to the next process.
- Inventory counting
- We accommodate requests for regular inventory counting, cycle counting, and others as needed.
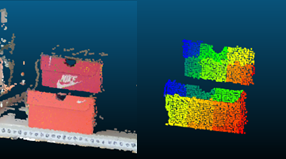
Objects that can be handled
Initially, we are focusing on handling various types of boxes, but we plan to consider handling items other than boxes in the future.
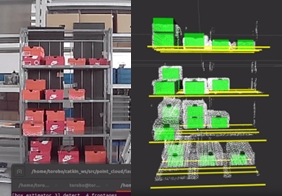
- Shoe boxes
- Boxed appliances
- Boxed industrial parts
- General cartons