Features
Easy to use in many situations
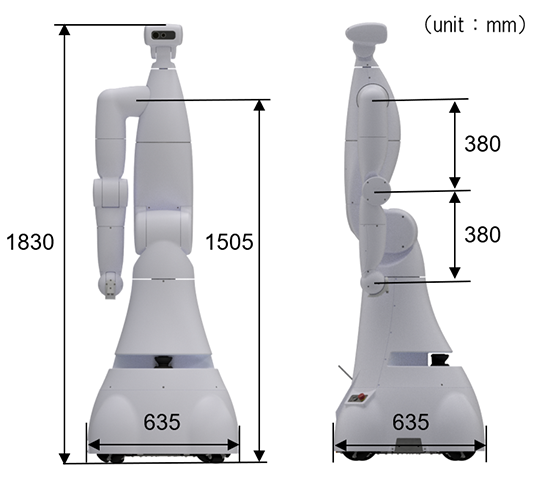
- Footprint close to the size of an electric wheelchair and asymmetrical arm configuration allows it to work in narrow spaces
- Reaching range is from 0.1 m to 2.1 m above the floor
- 6 kg payload (at the worst posture) that enables many tasks
- Sensor-less joint impedance control (precise force control is possible if an optional force sensor is used at the tip of the arm)
Sufficient joint configuration for a wide variety of tasks
The joint configuration of 7-axis arm (P, R, P, R, P, R), 2-axis waist (P, Y), 2-axis neck (Y, P), and 4-axis omni-directional mobile base enables the robot to do tasks with a range of motion similar to humans in working spaces of people.
ROS support
Because it is ROS-compatible, the robot in Gazebo (a simulator for ROS) and the actual robot can be operated using the same program. This makes it possible to safely verify the robot's behavior. In addition, trajectory planning and self-interference detection using MoveIt! are implemented as standard.