-
SL40 カメラヘッド

-
SL80 カメラヘッド
-
カメラコントローラ(SL40/SL80共通)


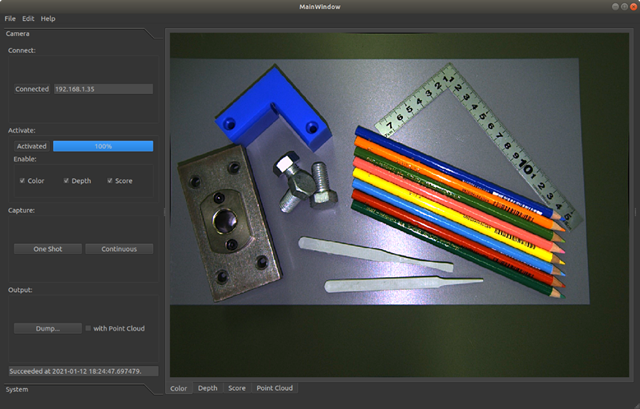
JPEG形式やPNG形式で保存可能です。
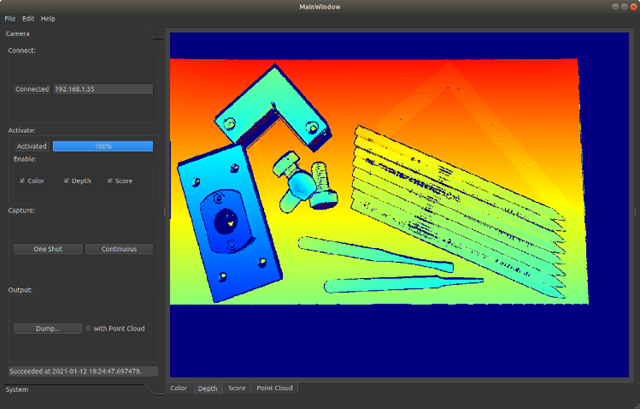
OpenEXR形式(浮動小数)やPNG形式(16bit整数)で保存可能です。

PCD形式(PointCloudLibrary出力形式)やPLY形式(多くのCAD系ソフトでサポートされている形式)で保存可能です。
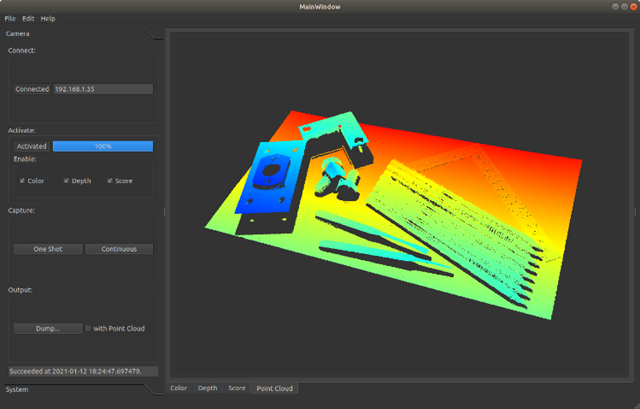
PCD形式(PointCloudLibrary出力形式)やPLY形式(多くのCAD系ソフトでサポートされている形式)で保存可能です。
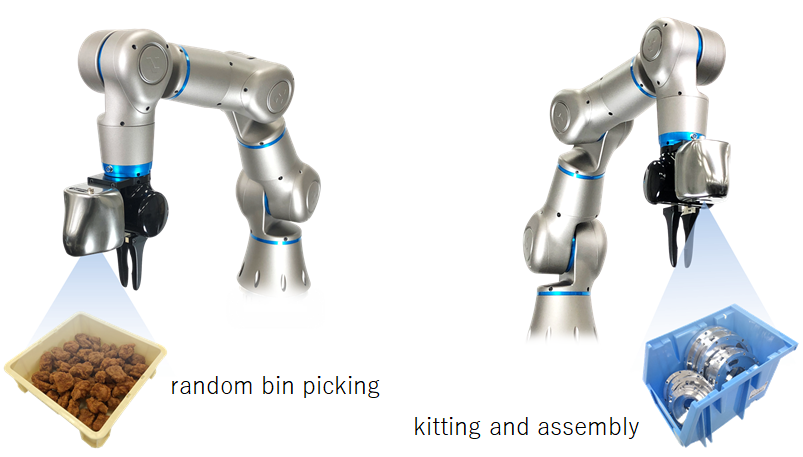
Torobo Eyeをロボットアームの手先や双腕ロボットの頭部に取り付けることで、バラ積みピッキングや組み立て等を行う自律ロボットをコンパクトに構築することができます。特に、安全柵が不要な協働ロボットや移動マニピュレータにおいては、ロボットと共に移動可能であるため、より機動性の高いシステムの構築が可能です。これは、環境に固定設置するタイプの3次元カメラと比較し大きなメリットであると言えます。
Torobo Eyeはデプス画像とカラー画像を同じカメラで取得するため、2つの画像にズレが生じず精度の高い3次元カラー情報が得られます。そのため、機械学習を用いた認識技術と組み合わせることで、外観検査や形状測定、良否判定などが可能になります。サイズもコンパクトであることから取り付けの自由度が高く、省スペースの検査・生産ラインを構築することができます。
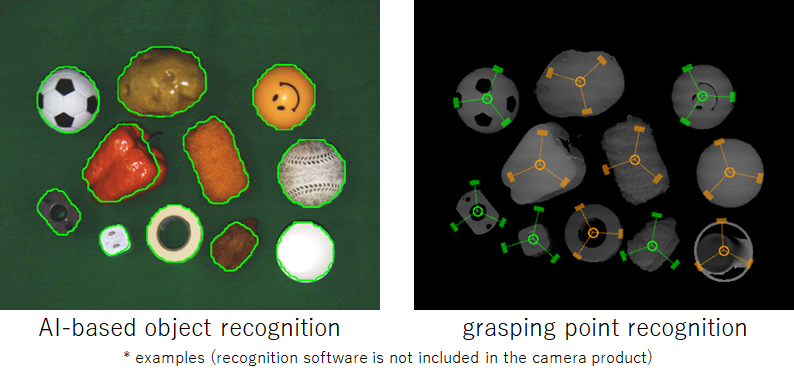
※本製品はカラー画像、デプス画像、および3次元点群を出力するデバイスですので、セグメンテーションや把持位置検出などの認識エンジンはお客様の方でご準備いただきます。
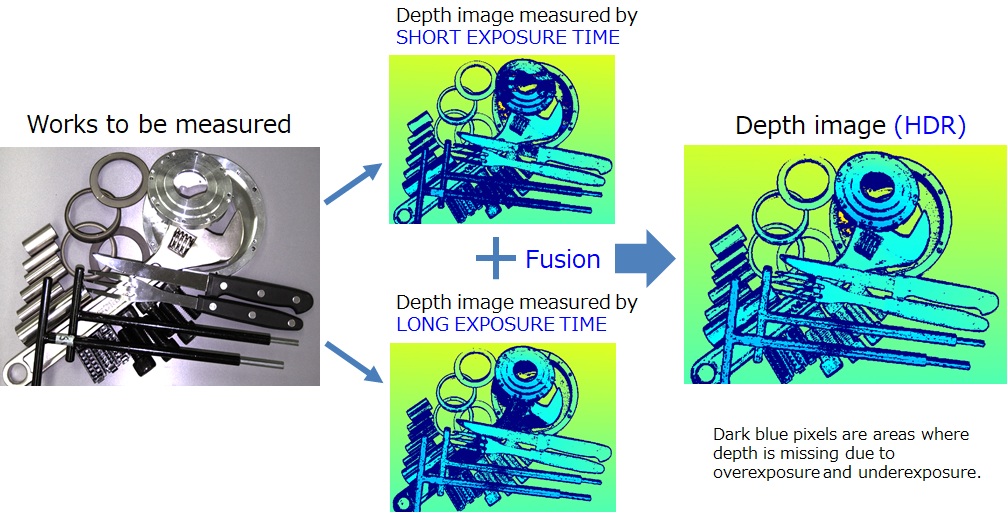
ハイダイナミックレンジ(HDR)撮影の機能を使用すると、複数の露光時間で撮影を行い各露光時間からデプスの品質が良好な画素を抽出して統合します。これにより、デプスの欠落が生じやすい金属光沢や黒色のワークを一度の撮影で計測することが可能です。
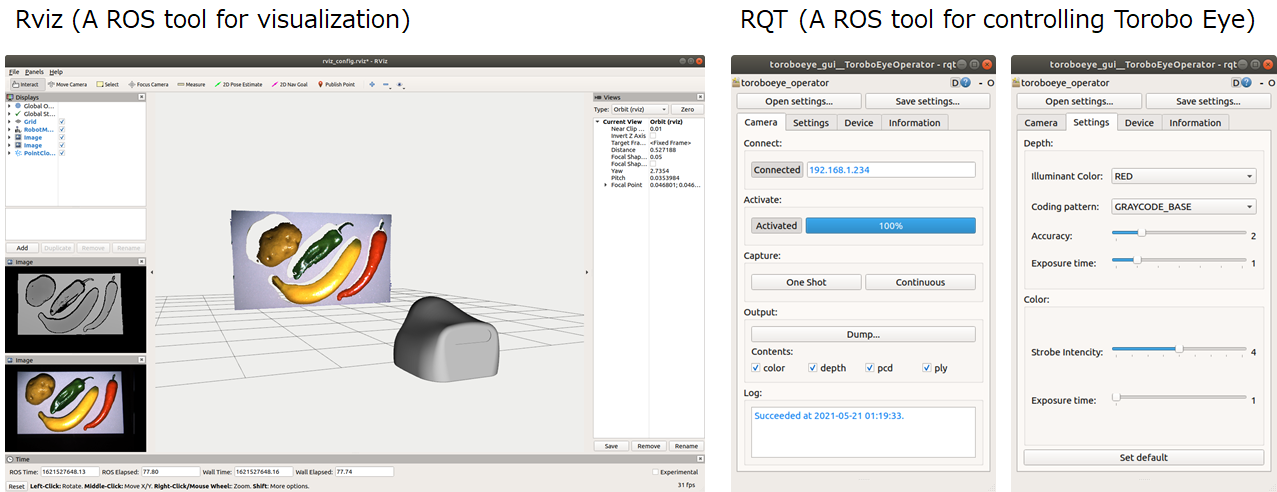
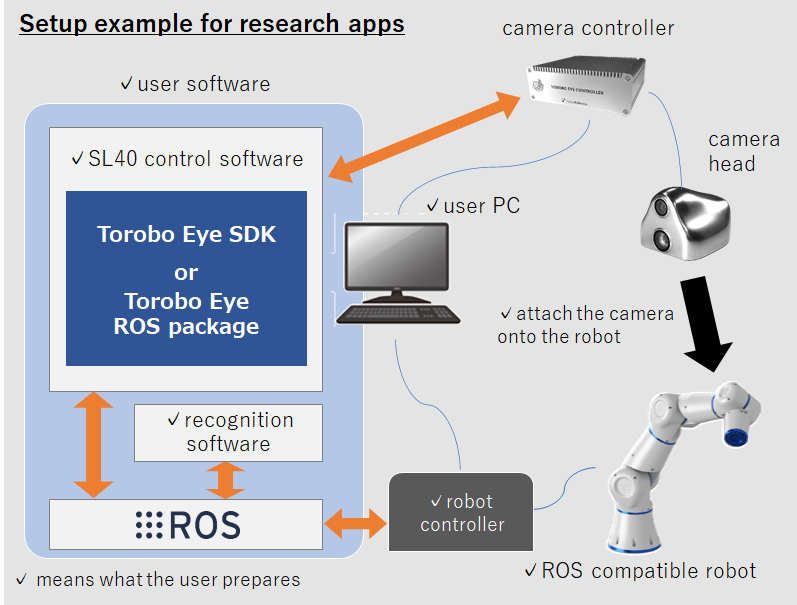
Torobo Eye 用の ROSパッケージを公開しています。これを使用することによりROSとTorobo Eyeを連携することが容易です。
Torobo Eye SDK (Python, C++) には OpenCVライブラリ や Open3Dライブラリ のインストールスクリプトがついており、これらのライブラリを使用した認識処理の実装がすぐに可能です。
| SL40 | SL80 | 説明 | |
| 計測方法 | アクティブステレオ(空間コード化法) | 位相シフト法ベースのアルゴリズム | |
| 照射パターンのベースカラー | 白, 赤, 緑, 青 | 計測対象に合わせて変更可能 | |
| 解像度 [pixel] | 1440 x 1080 | ||
| 深度誤差(ばらつき) [mm] | 0.06 | 0.10 | SL40: 距離450mmにおける高解像度モードでの深度計測値の標準偏差 SL80: 距離700mmにおける高解像度モードでの深度計測値の標準偏差 |
| 計測時間 [msec] | 180 | 高速モードで1回撮影した場合 | |
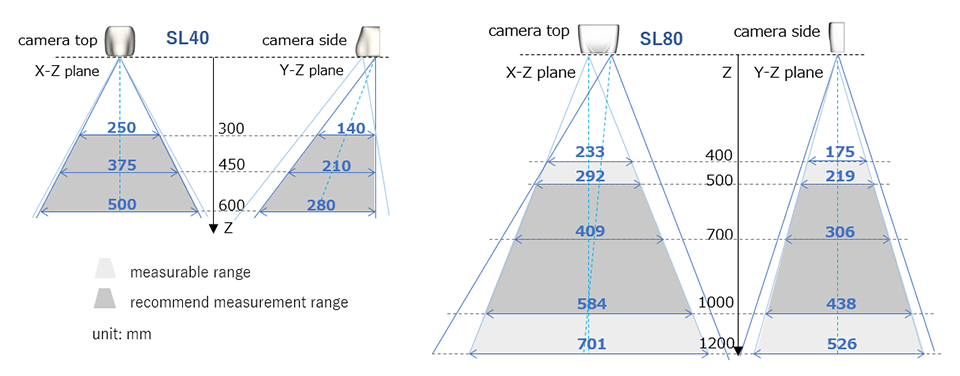
| 計測範囲 (XY)*計測面 [mm] | 375 x 210 | 409 x 306 | SL40: 距離450mmにおけるXY有効範囲 SL80: 距離700mmにおけるXY有効範囲 |
| 計測範囲 (Z)*デプス方向 [mm] | 300 - 600 | 400 - 1200 (500 - 1000 recommended) |
デプス方向の推奨範囲 |
| 対応OS | Ubuntu 18.04 LTS, Ubuntu 20.04 LTS, Windows 10/11 | ご自身で準備いただくホストPCのOS | |
| 提供ソフトウェア | ユーザインタフェース, SDK (APIライブラリ), ROSパッケージ | ライブラリはPythonとC++に対応 | |
| 通信 I/F | Ethernet | ギガビットイーサ以上のラインを使用して下さい | |
| 電源 | 24V DC | ||
| 電力消費量 (連続撮影時) [W] | 48 | 連続撮影時のカメラヘッドとコントローラの平均合計消費電力 | |
| 電力消費量 (待機時) [W] | 12 | 待機状態(非撮影状態)のカメラヘッドとコントローラの合計消費電力 | |
| サイズ [mm] | カメラヘッド: W92 x H75.5 x D95 カメラコントローラ: W140 x H50 x D140 |
カメラヘッド: W140 x H47 x D97 カメラコントローラ: W140 x H50 x D140 |
コネクタとケーブルのサイズは含んでおりません |
| 質量 [g] | カメラヘッド: 460 カメラコントローラ: 854 |
カメラヘッド: 500 カメラコントローラ: 854 |
|
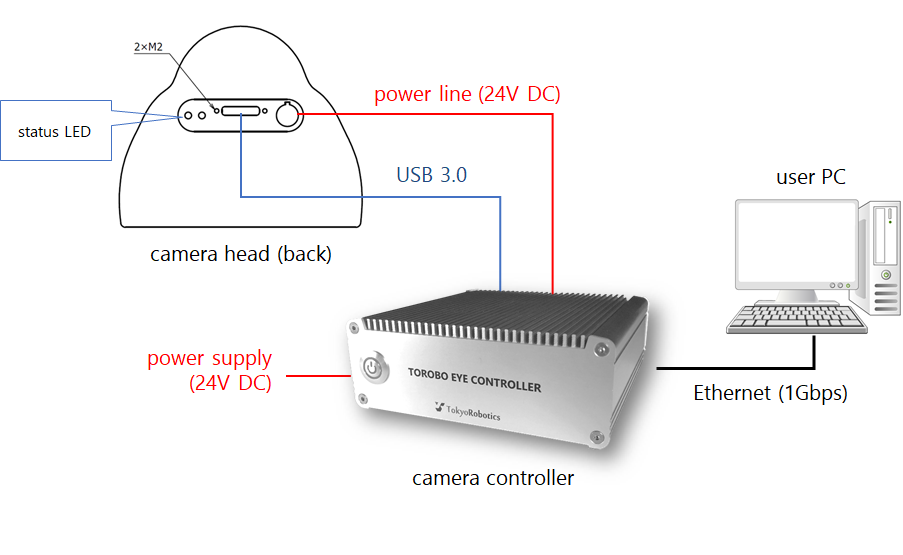
カメラ画像の取得は、Torobo Eyeとご自身でご準備いただいたPCとをイーサネットケーブルで接続するだけで容易に行うことができます。電源に関しても、お客様のほうで直流24Vを生成するスイッチング電源や安定化電源、バッテリ等をご準備いただくことになります。また、カメラヘッドに別電源から直接24Vを入力することも可能です。
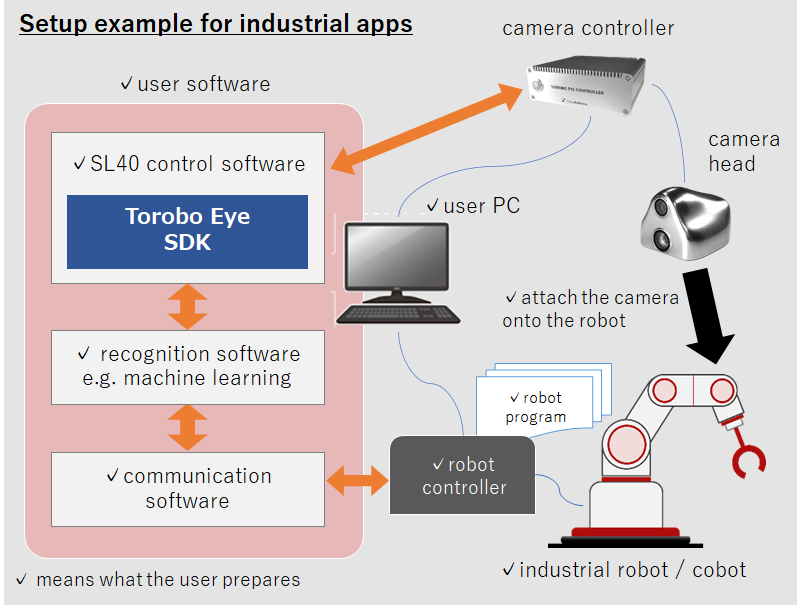
産業用のアプリケーションにおいて、提供されるSDKを用いることで、ご自身が開発したソフトウェアからTorobo Eyeに容易に接続することができます。Torobo Eyeは3次元データを出力するのみですので、必要に応じてPCにご自身で物体認識等のアルゴリズムを実装いただくことになります。また、ROSのパッケージも提供されますので、研究用途でROS対応のロボットを使用されている場合は、より簡単にロボットシステムを構築できます。
より詳しくは、こちらのカタログをご覧ください。
その他Torobo Eyeについてより詳しく知りたい方はこちらのブログ記事をご覧ください。
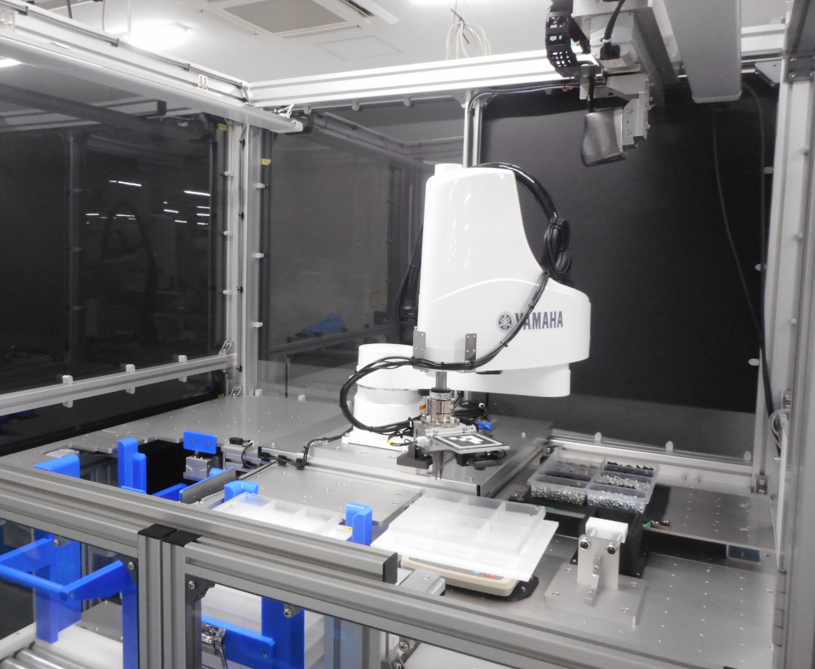
2022国際ロボット展にて参考出展されたヤマハ発動機様のボルトピッキングシステムにも採用されています。
以下の点について、高い評価をいただきました。
・ボルトピッキングに十分な検出精度であること(M3サイズ~)
・光源がレーザーでないことで作業者が扱いやすいこと
・コストパフォーマンスが高いこと
お見積もり、ご質問はこちらまで: trbe-sales[at]robotics.tokyo