Torobo Arm
2019年12月をもって、本事業は終了いたしました。なお、既にご購入いただいたお客様への故障対応やサポートは継続いたしますので、ご安心下さい。
2018年度 日本ロボット学会 実用化技術賞・2016年度 日本機械学会 優秀製品賞 受賞製品

Torobo Armは全関節にトルクセンサを備えているため、電流値を用いる方法と比較し、より精度の高いトルク検知が可能です。柔らかい外力追従や力制御、より安全な接触検知などが実現できます。
Torobo Arm購入の際は、マスターコントローラ(サーボコントローラ;C言語)およびPC(ホストコントローラ;C#)のソースコードが提供されます。そのため、低次のトルク制御から高次の軌道制御まで、ご自身で幅広いカスタマイズが可能です。
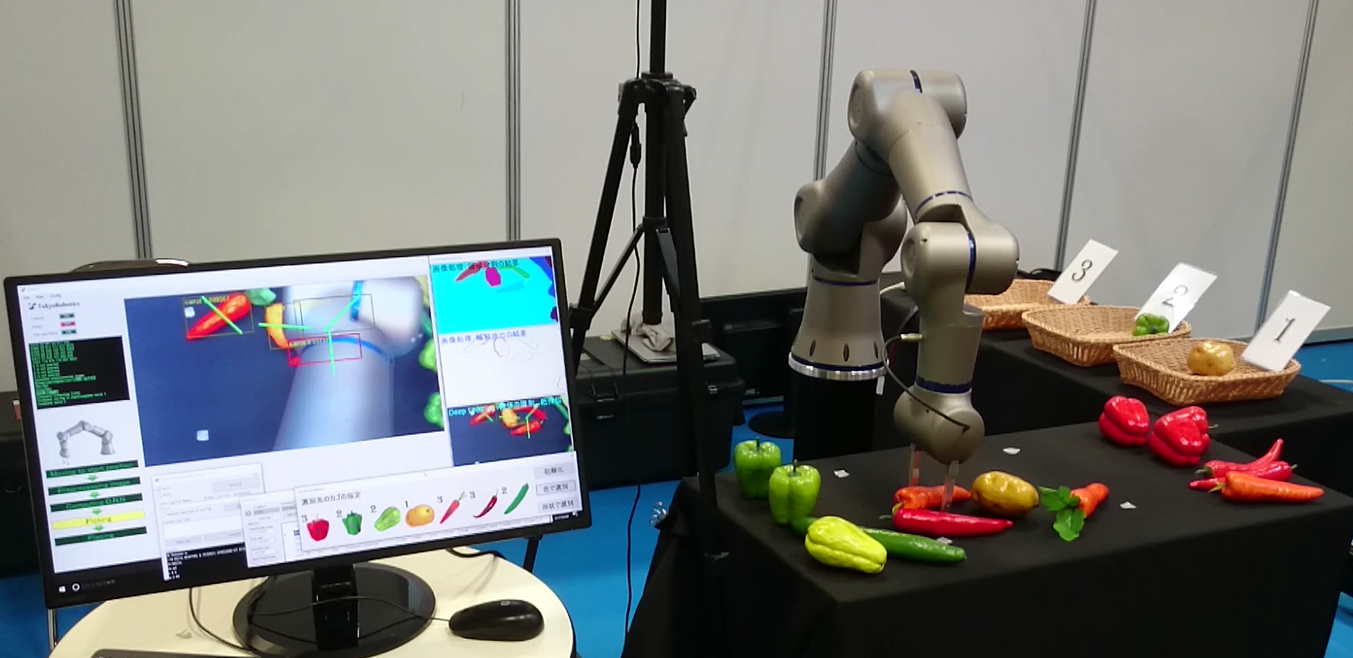
ROSに対応しており、外部システムとの連携が容易です。ROS/MoveIt!とカメラを組み合わせたリーチングや、移動台車と組み合わせたモバイルマニピュレータなどの構築が短期間で可能になります。

研究プラットフォームながらも、高い剛性を持ち、品質の高い部品を使用することで、産業用ロボットアームに準じる性能を実現しています。手先の繰り返し位置精度は0.05mmです。
ロボットアームを制御するロボットコントローラ(マスターコントローラ)は、横幅170mm×高さ50mm×奥行き120mmという小型のサイズになっています。重量は約1kgです。そのため、移動ロボットなどへの搭載も容易です。
電源はDC24Vを使用するため、特別な電源を敷設する必要がありません。また、バッテリーでの駆動も可能なため、自律型のモバイルマニピュレータにも使えます。
強化学習などの機械学習には、探索的動作が必要です。トルク検知機能により、環境やロボット自身を破壊することなく、それを実行することが可能です。
部品のはめ込みなどの作業を対象物やロボットを破壊しないように実施するには、力制御が必要です。そのようなロボットをラインに組み込むことの有効性や実現可能性を検討できます。


Torobo Armは、コントローラが小型でかつDC24Vのバッテリーでも駆動できるため、モバイルマニピュレータのアームとして最適です。関節トルク制御により関節にインピーダンス特性を持たせれば、リーチングの際に画像認識等の誤差を吸収することもできます。

人間共存ロボットや協働ロボットには、接触に対する安全性が重要になります。力制御とトルク検知機能により、人に危害を加えないロボットの研究開発を行うことができます。
関節角度・角速度、電流値、およびトルク値を取得可能なため、各種ハードウェアパラメータ(質量中心や慣性モーメント、摩擦係数等)を推定する研究が行なえます。外乱オブザーバの設計などにも力を発揮します。
PCから各関節のPID制御パラメータを変更することで、動作の違いを容易に確認できます。また、実ロボットを用いた運動学や動力学の実装も学習できます。

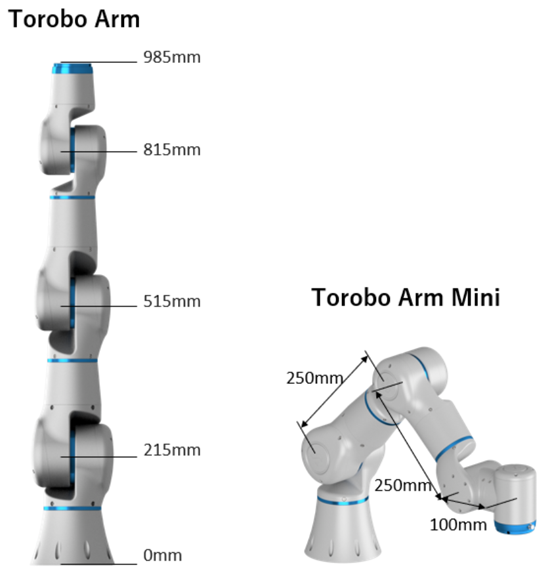
| Torobo Arm | Torobo Arm Mini | ||
| Degrees of freedom | 7 | 7 | |
| Reach | 600 mm | 600 mm | |
| Weight | 19 kg | 13 kg | |
| Payload | 6 kg | 3 kg | |
| Rotation range | Joint 1 | +/-170 degree | +/-165 degree |
| Joint 2 | +/-110 degree | +/-110 degree | |
| Joint 3 | +/-165 degree | +/-165 degree | |
| Joint 4 | +/-125 degree | +/-120 degree | |
| Joint 5 | +/-165 degree | -150~195 degree | |
| Joint 6 | +/-120 degree | -105~90 degree | |
| Joint 7 | +/-170 degree | +/-170 degree | |
| Maximum angular velocity | 100 degree/s (Joint 1,2) 120 degree/s (Joint 3,4) 160 degree/s (Joint 5,6) 240 degree/s (Joint 7) |
120 degree/s (Joint 1,2) 150 degree/s (Joint 3,4) 200 degree/s (Joint 5) 160 degree/s (Joint 6) 200 degree/s (Joint 7) |
|
| Repeatability | +/-0.05 mm | ||
| Sensors | 19/18-bit absolute encoder (output/input) Torque sensor (all joints) Current sensor (all joints) |
||
| Motor | Blushless DC Motor | ||
| Gear | Harmonic Drive™ | ||
| Poser supply | DC 24 V | ||
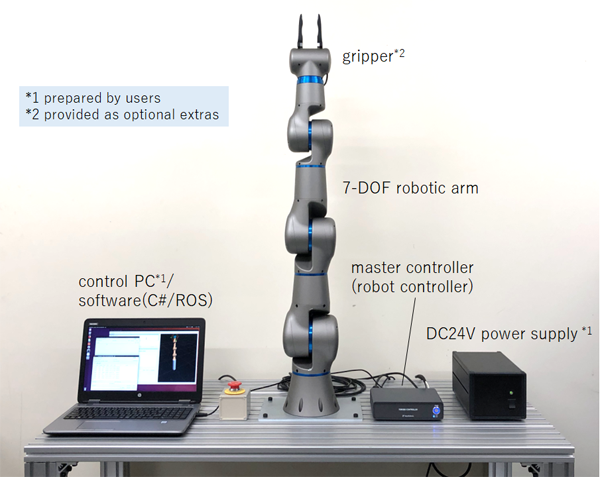
ロボットアーム、マスターコントローラ(ロボットコントローラ)、およびPC(ご自身で準備)からなるシンプルなシステムです(アーム台座は別売り)。電源には、DC24Vを発生可能なスイッチング電源や安定化電源、バッテリーを用います。負荷側電圧変動を許容しないスイッチング電源がバッテリーにはシャントレギュレータが必要です。マスターコントローラ用とPC用のサンプルコードおよびROSパッケージが付属し、ユーザーマニュアルも提供されるため、買ったその日から使用することができます。
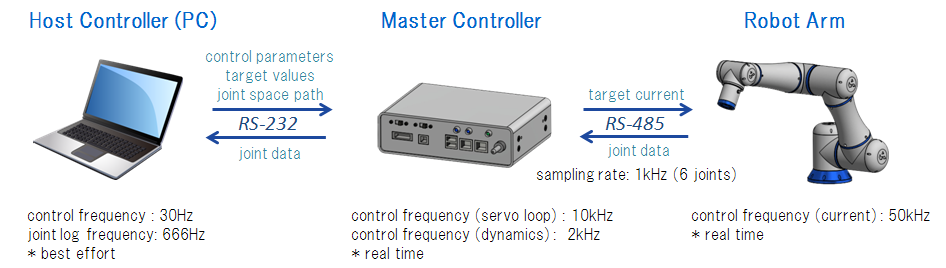
図中のマスターコントローラにサーボループを実装しており、ロボットアームに対し電流指令値を送信します。通信周期は約1msです。ロボットアームの各関節にはスレーブコントローラが内蔵されており、マスターコントローラとのデータの受け渡しとモータの電流値制御を行います。PC(ホストコントローラ)からは、位置、速度、トルク、および電流の指令値や、関節軌道(各関節の時刻・角度・角速度データ)、制御パラメータをマスターコントローラに送信します。ホストコントローラはWindowsまたはUbuntuで動作し、制御周期はOSのタスク管理に依存します。
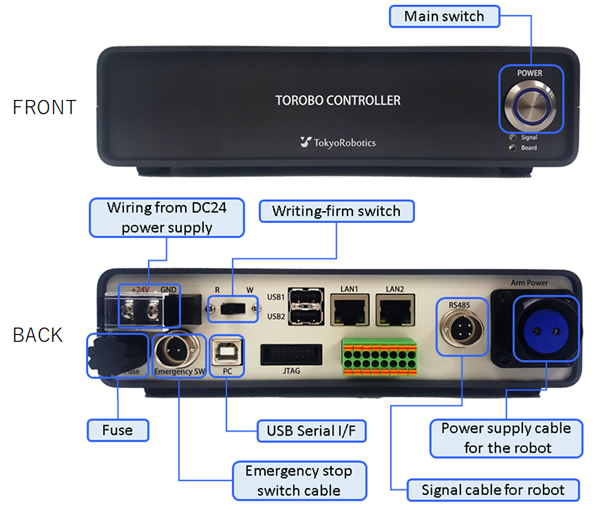
マスターコントローラには、ルネサスエレクトロニクスのRXシリーズマイコンを搭載したCPUボードを使用しています。USBまたはJTAGコネクタからマイコンの書き込みやオンチップデバッグが行えます。また、予備のイーサネットポートなども搭載しているため、ご自身でマスターコントローラ同士のイーサネット(またはEtherCAT)通信を実装することも可能です。
マスターコントローラのサンプルコードとしては、アームの全関節に対する位置、速度、トルク、および電流のサーボコントロールに加え、重力補償や慣性補償、トルクセンサを用いた外力追従、軌道制御が実装されています。サンプルコードは、ルネサスの開発環境であるe² studio(Eclipseベース)により編集およびビルドできます。
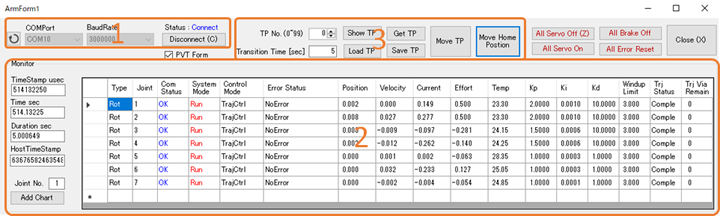
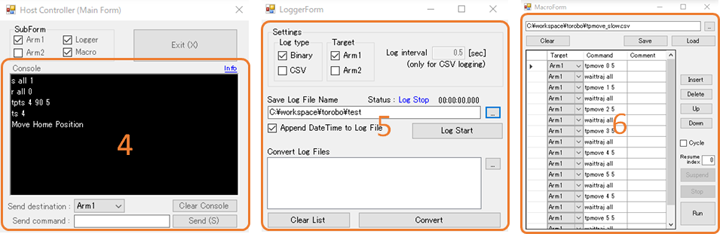
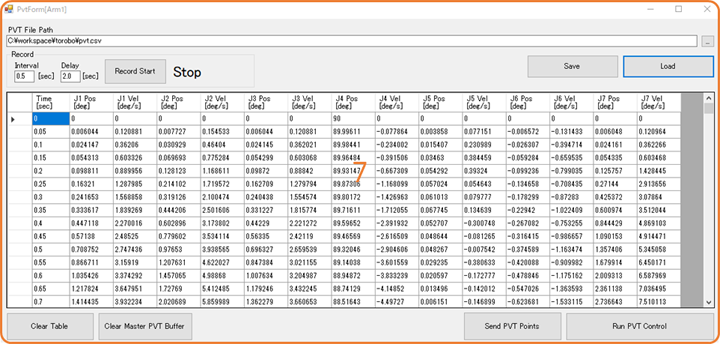
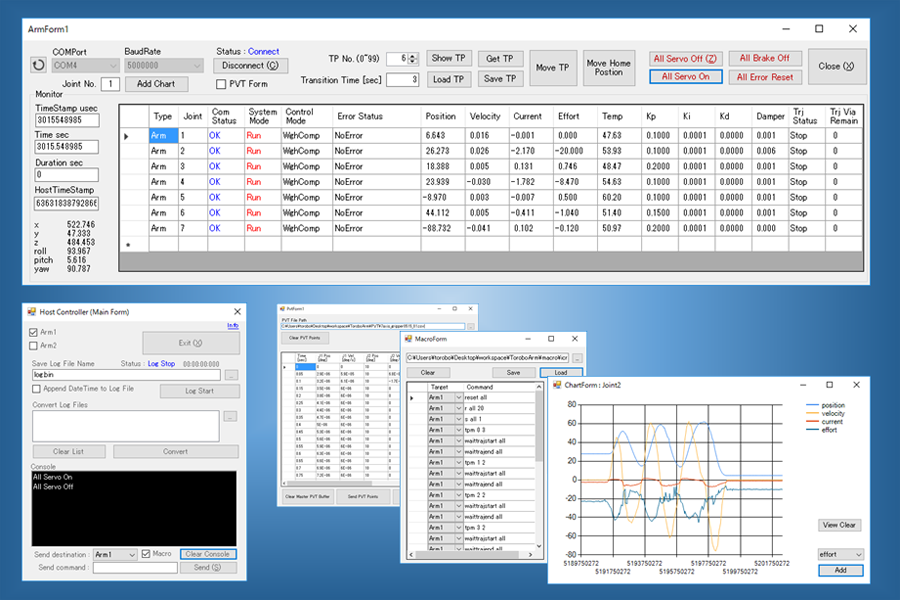
ホストコントローラはWindows上で動作するアプリケーションとしてC#で実装されており、ソースコードが提供されます。関節単位の位置・速度・トルク・電流値の制御、PVTデータ(各時刻の関節位置と速度のデータ)を与えることによる軌道制御、関節情報のログデータの取得などが可能です。
図の各項目について以下で説明します。
ROS(Robot Operating System)はロボット用のミドルウェアです。Torobo Armに同梱されたROSパッケージを用いることで、以下を実現することができます。
・ROSの標準的なメッセージ型「control_msgs」に対応していますので、アームをC++/Pythonプログラムから簡単に操作することができます。
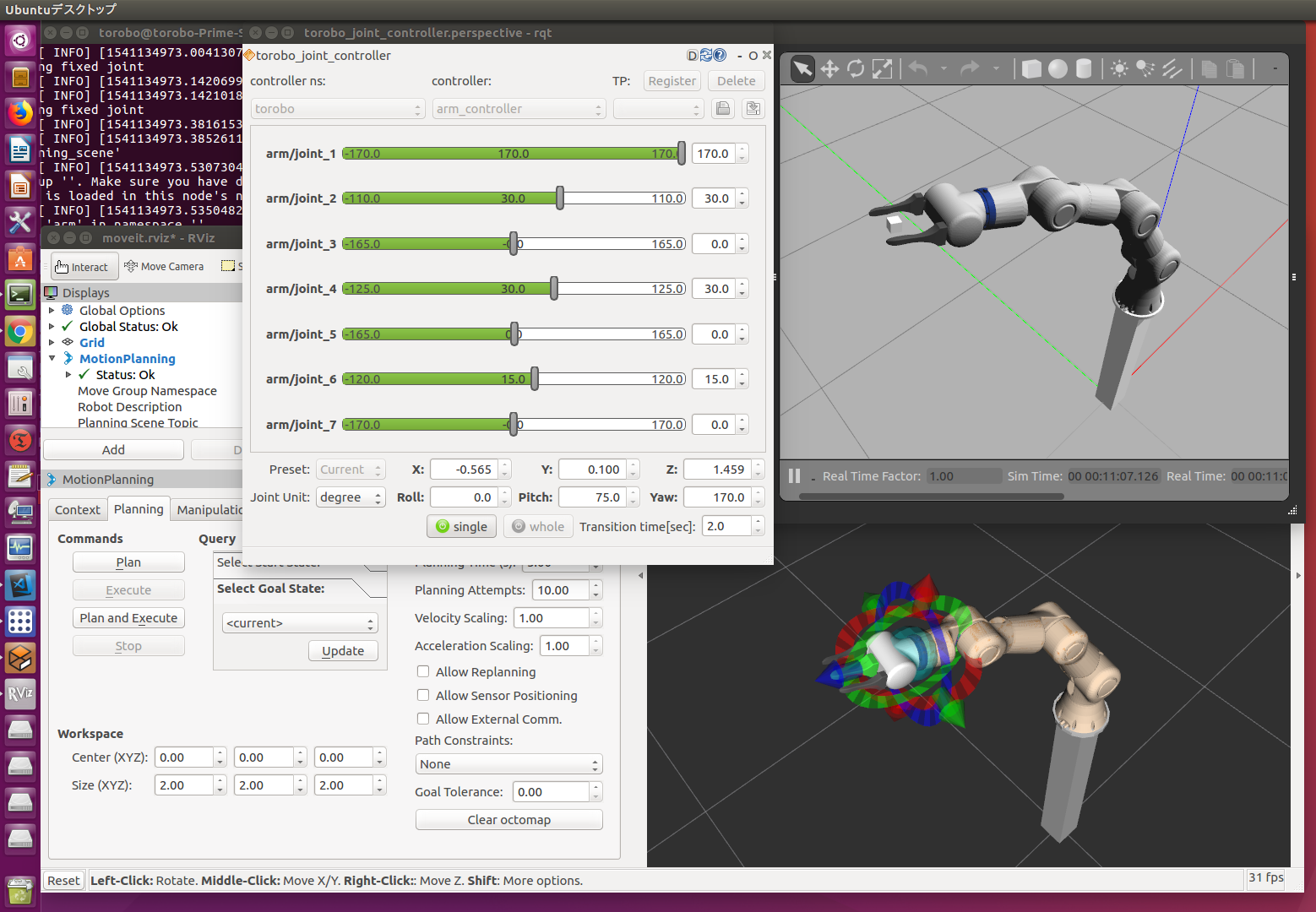
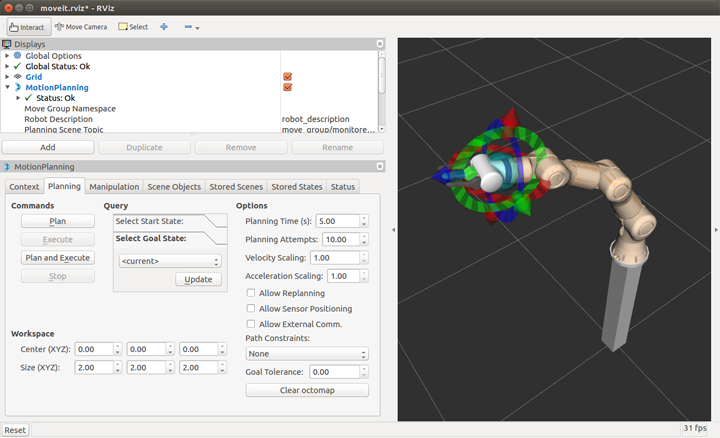
・ROSの可視化ツール「Rviz」に対応していますので、アームの現在位置と目標位置を3次元表示で確認することができます。
・ROSで広く使われている軌道計画ソフトウェア「MoveIt!」に対応していますので、運動学計算や干渉判定、軌道生成といった高度な機能をすぐに利用することができます。
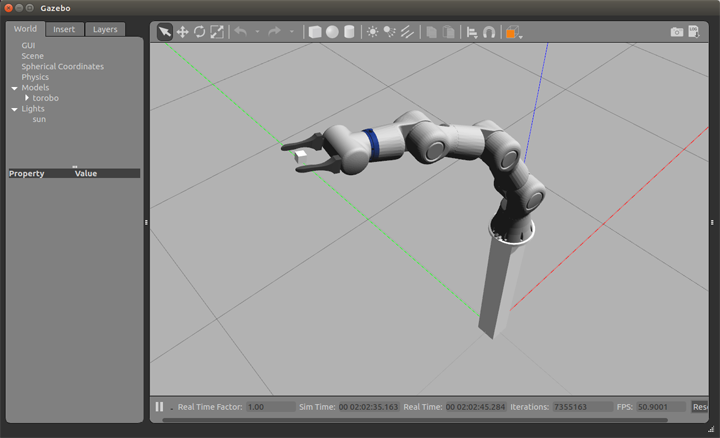
・物理シミュレータ「Gazebo」に対応していますので、ユーザ自身が作成したTorobo Arm 操作用プログラムの動作をPC上でテストすることができます。
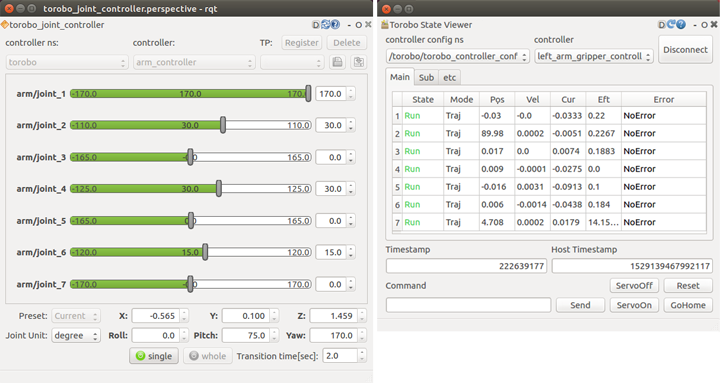
・GUIツール「torobo_joint_controller」を使用することで、アームの関節を直接操作することができます。
・GUIツール「torobo_state_viewer」を使用することで、アームの各関節の状態を表示することや、アームに制御コマンドを送信することができます(実機のみ)。
本パッケージは下記のPC環境でのご使用を推奨しています。
| CPU | Intel i5以上のプロセッサ |
| メモリ | 4GB以上 |
| ディスク容量 | 15GB以上 |
| OS | Ubuntu 16.04 LTS |
| ROS Version | ROS Kinetic Kame |
ロボットを載せるための台座です。サイズはW:800mm, H:880mm, D:800mmです。ロボット底面の図面を提供し、ご自身で準備していただくこともできます。

スライド開閉式のグリッパです。ロボットの内部バスを使用するため配線が外に出ません。また、指は取り外しできるため、アプリケーションに応じてご自身で準備いただくこともできます。

大手機械メーカー、大手センサメーカー、大手ロボットメーカー①、大手ロボットメーカー②、大手電機メーカー①、大手電機メーカー②、大手電機メーカー③、大手電子部品メーカー、大手モータメーカー、大手計測器メーカー、大手鉄鋼メーカー、ITベンチャー、人工知能ベンチャー、バイオベンチャー、産業総合研究所、茨城県工業技術センター、沖縄科学技術大学院大学、東北大学、金沢大学、東京工業大学、首都大学東京、徳島大学、京都大学、日本大学、日本工業大学、早稲田大学
お見積もり、ご質問、見学依頼はこちらまで: contact[at]robotics.tokyo