Features
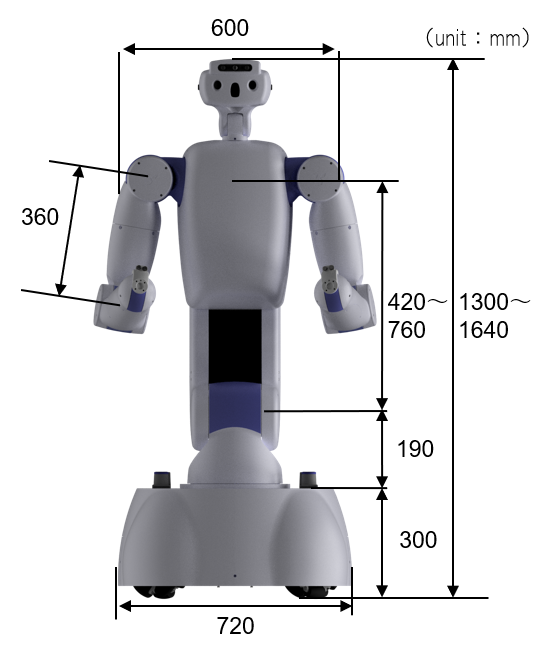
Size and strength equivalent to humans
With a height of 1300~1640 mm (variable), a reach of 740 mm, and a cart width of 720 mm, the size of the robot is close to that of humans. The payload of one arm is 6 kg at the worst-case holding posture, which is sufficient to develop many applications.
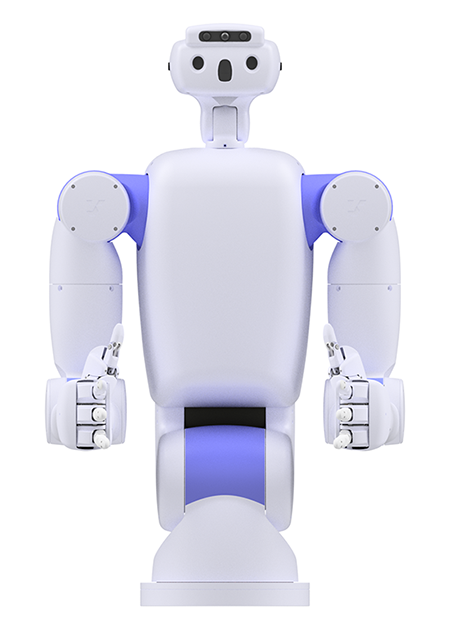
Sufficient joint configuration for a wide variety of tasks
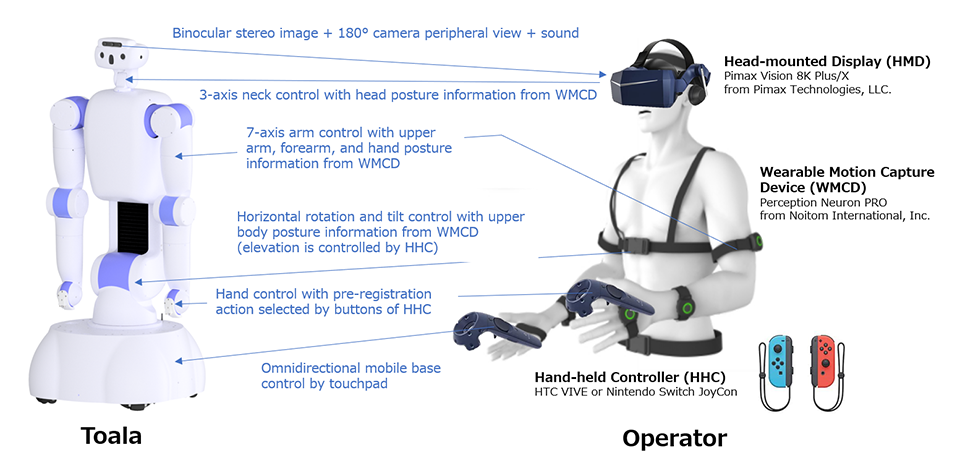
The joint configuration of 7-axis dual arms, 3-axis waist (yaw, pitch, elevation), 2-axis neck (yaw, pitch), and 4-axis undercarriage (omni-directional mobile base) enables the robot to do tasks with a range of motion similar to human beings in living and working spaces of people.
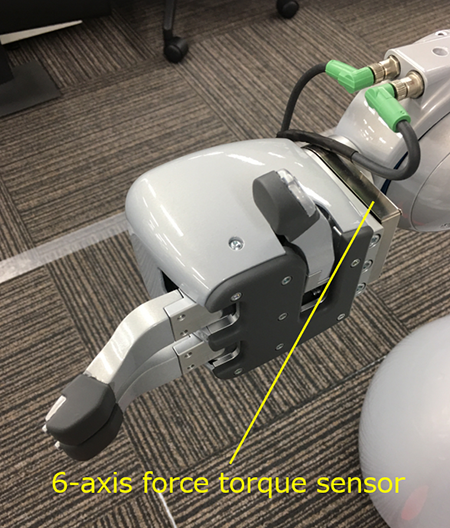
Torque sensing of arm and waist
By using joint disturbance observers for the arms and waist, external force detection is possible without torque sensors, enabling contact stop and joint flexibility.
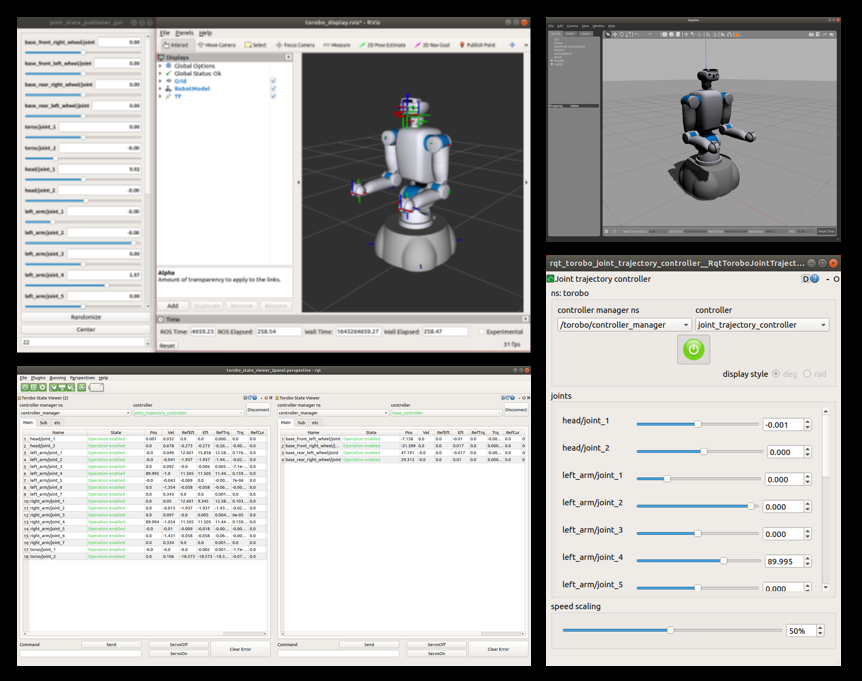
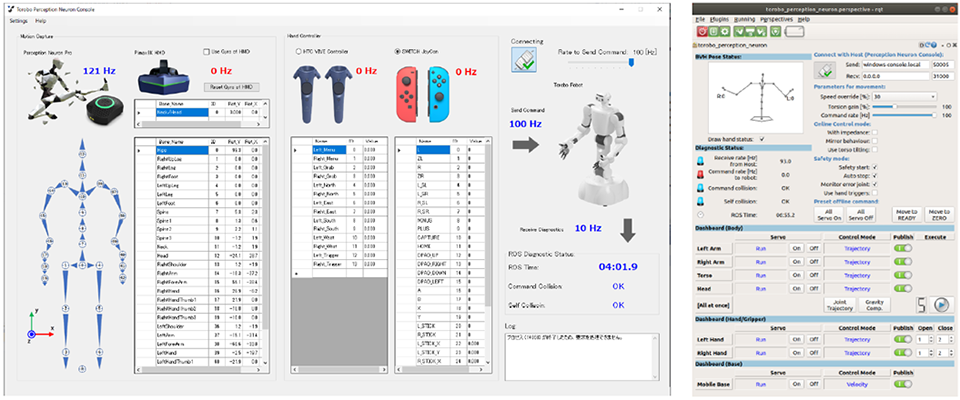
ROS support
Because it is ROS-compatible, the robot in Gazebo (a simulator for ROS) and the actual robot can be operated using the same program. This makes it possible to safely verify the robot's behavior. In addition, trajectory planning and self-interference detection using MoveIt! are implemented as standard.