Under Development
Humanoid operation device
Torobo Puppet

Torobo Puppet is a humanoid operation interface that accelerates AI research and development
Intuitive Operation
When you move the Puppet, a scaled-down model of Torobo's upper body with proportional link lengths, Torobo moves in sync with the Puppet.
Two Configurations for Various Tasks
In addition to a stationary setup, it can also be used in a wearable configuration, allowing the operator to move freely during tasks.
Force Feedback in the Hands
A feature transmits vibrations to the operator when a certain level of force is applied to the robot's hands.
Box Transport with Station Type
This video shows box toransportationwith station type puppet. By intuitively operating the robot, tasks can be performed more easily than by programming.
| Specification | Details |
|---|---|
| Available Joints |
Staition Type: arm : 7 passive joints on each arms torso: 2 passive joints neck: 2 passive joints by tip controller cart: x, y, yaw by tip controller Wearable Type: arm : 7 passive joints on each arms torso: 1 passive joints neck: 2 passive joints by tip controller cart: x, y, yaw by tip controller |
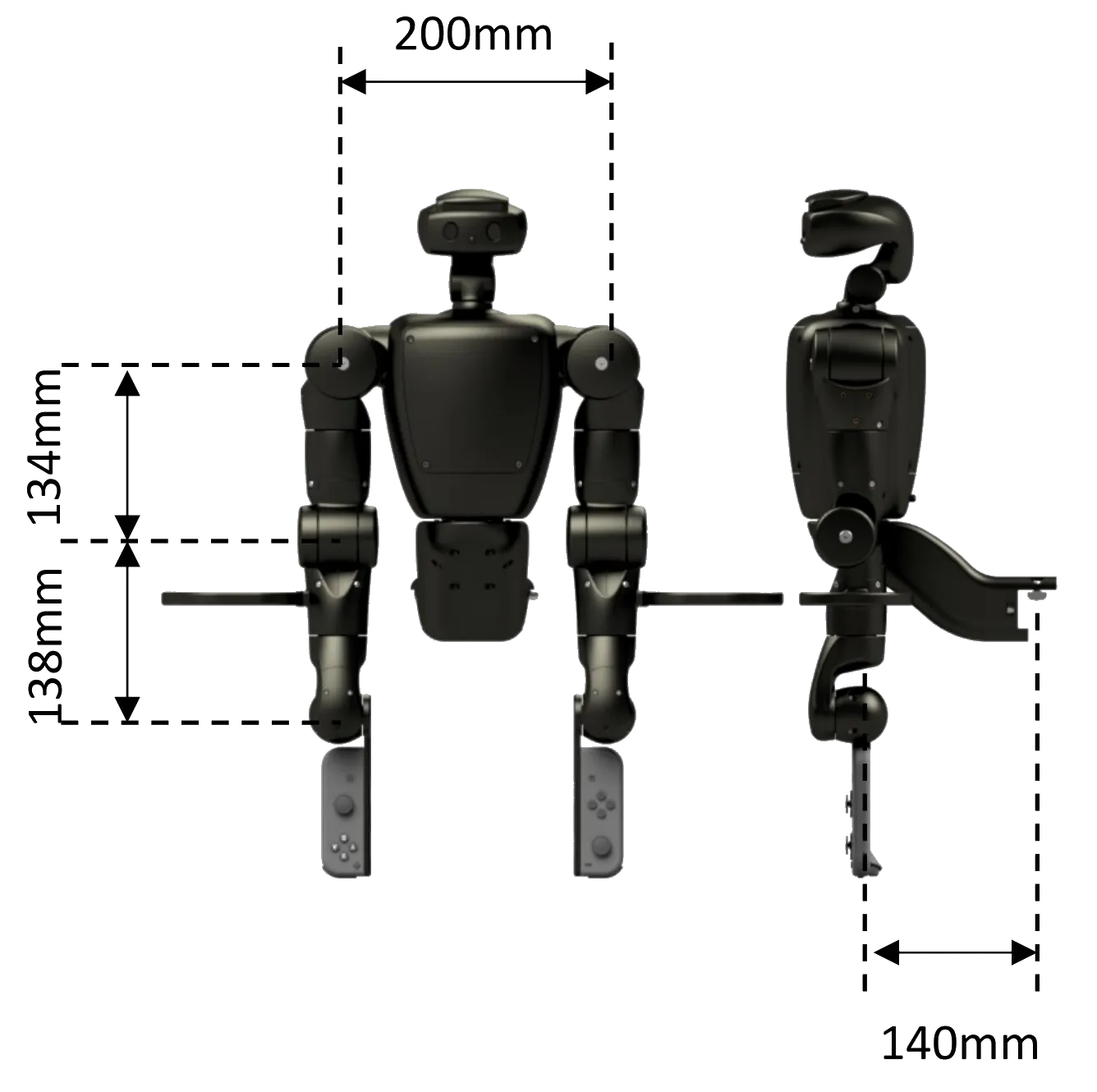
| Size | 1033mm x 790mm x 770mm |
| Weight | Approx. 21 kg when station type, 3 kg when wearable type. |
| Power supply | 100VAC |
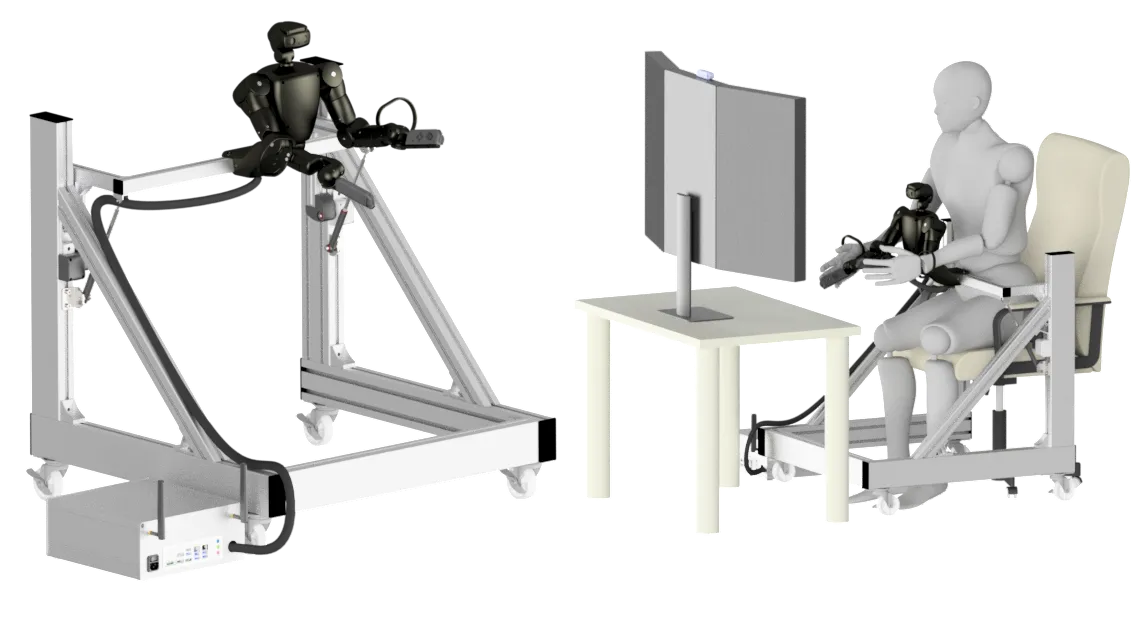
Station Type
The stationary model is designed so that the operator can sit in a chair while controlling the puppet. Additionally, the axis corresponding to the robot's Torso/Joint2 is attached to the base of the stationary setup. When the operator leans forward, the robot's Torso/Joint2 moves in sync with their motion.
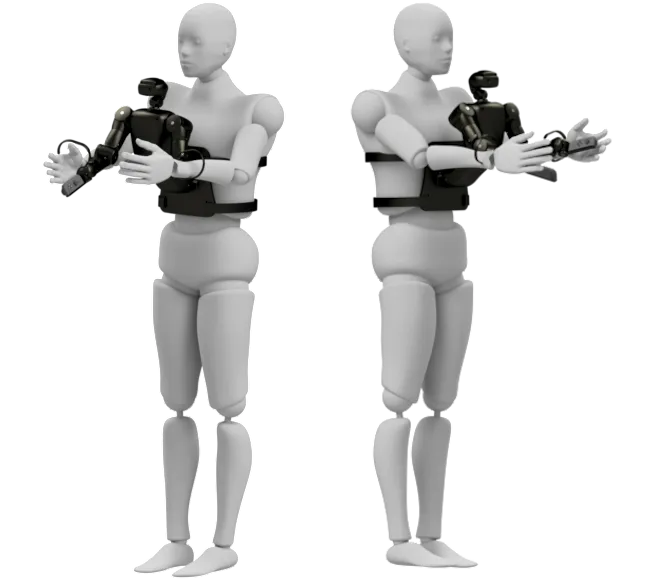
Wearable Type
The wearable model is designed to be attached to the operator's body, allowing for operation. The operator can control the robot while observing it from any position or perspective.