Legacy Products
Next Product and Solution
We are developing new robots and solutions to realize a society in which people are freed from manual labor.

Torobo Hand (Four Finger ver.1)
This 10-axis multi-fingered hand uses the world's smallest cycloid reduction gear developed by our company. Impedance control is made possible by the use of an efficient cycloid reduction gear. This allows the hand to not only conform to the shape of various objects, but also to prevent finger jamming.

Togrus
Togrus is a general-purpose mobile surveillance robot that has a camera mounted on the tip of its mobile manipulator. It was used as Togrus-DC in a data center monitoring solution with NTT Communications to check the inside of server racks over the Internet.

Tolon
Tolon is an easy-to-use mobile manipulator that can work in narrow spaces thanks to its asymmetrical arm arrangement and omni-directional mobile base. Tolon is a powerful tool for the R&D of next-generation autonomous robots that combine autonomous movement with image recognition for manipulation, and for the development of robot applications such as material handling, short-distance transport, patrols, etc.

Mobile Gripper
Mobile Gripper™ is a robot developed to automate short-distance transport and palletizing/depalletizing of heavy loads. It can handle plastic containers with open tops as it clamps boxes from both sides.

Remote Control Device (Force Feedback Type)
This is a bilateral tele-operation device that transmits force over a network. A robot equipped with a torque sensor and a cockpit-type operation device enable direct transmission of the force felt by the robot to the operator. This makes it possible to stably execute tasks that would be difficult with visual observation alone.

Torobo
Torobo is a robot developed to accelerate industrial applications of full-body humanoid robots. Equipped with torque sensors in all arm and waist joints, Torobo is capable of high-performance impedance and force control. Torobo can be used to automate tasks that involve active contact with objects and the surrounding environment, as well as for applied research in machine learning.

Toala
Unlike Torobo, Toala is not equipped with a joint torque sensor, but it can detect torque based on current values (disturbance observer) to stop contact and perform simple impedance control. It is intended for customers who wish to verify automation using a dual-arm robot.

Torobo Eye
Torobo Eye is a compact and lightweight 3D camera developed as a vision sensor for robots. It employs a structured light 3D measurement method to acquire high-definition 3D images. It is suitable not only as a fixed camera but also for installation on the end of small to medium-sized robot arms, including mobile manipulators.

Remote Control Device (Motion Capture Type)
This system allows the robot to be controlled remotely via a wearable motion capture device and a data glove/handheld device. The system is used for the purpose of working remotely and collecting learning data from the robot.
Torobo-kun
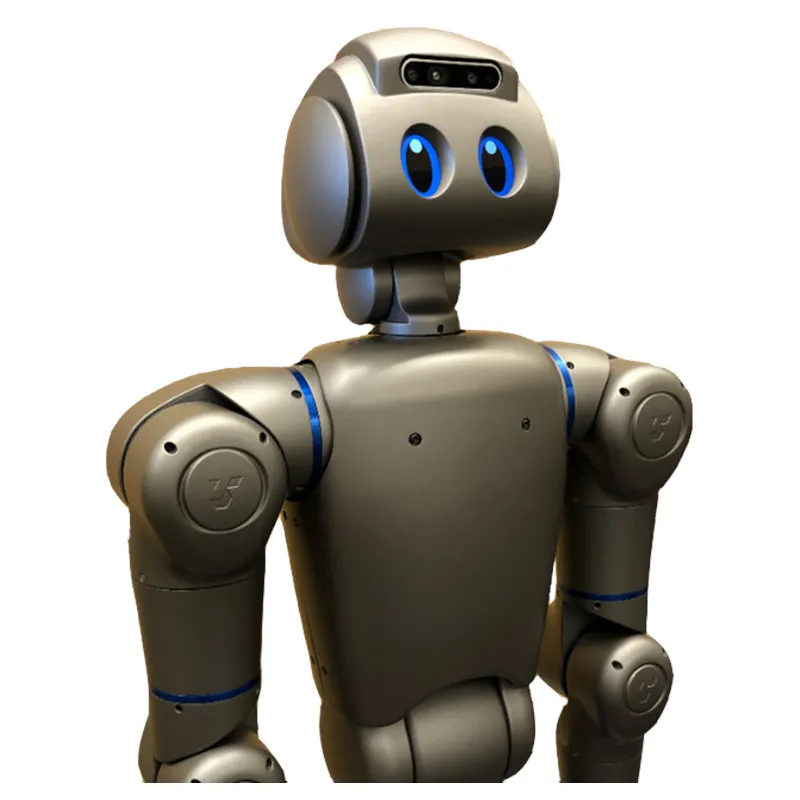
Torobo-kun is a humanoid robot designed to accelerate robotics research, consisting of a 6-axis dual arm, 2-axis waist joint, and 2-axis neck joint, with torque sensors on all axes and joint torque control. It also has an optional head interface with facial expressions to facilitate interaction with humans.
Torobo Arm Mini
Torobo Arm Mini is a compact research cooperative robot. Its features include safety (contact stop), convenience (small size, light weight, 24 VDC drive, direct teaching function), and cleverness (force control, impedance control).
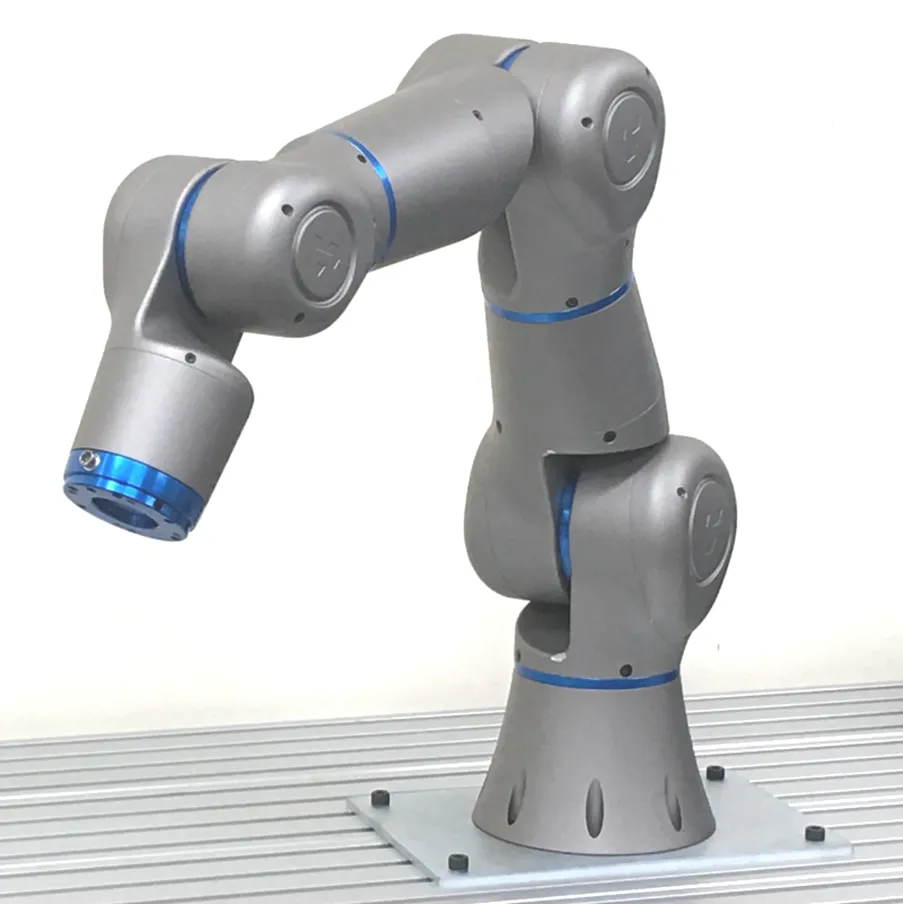
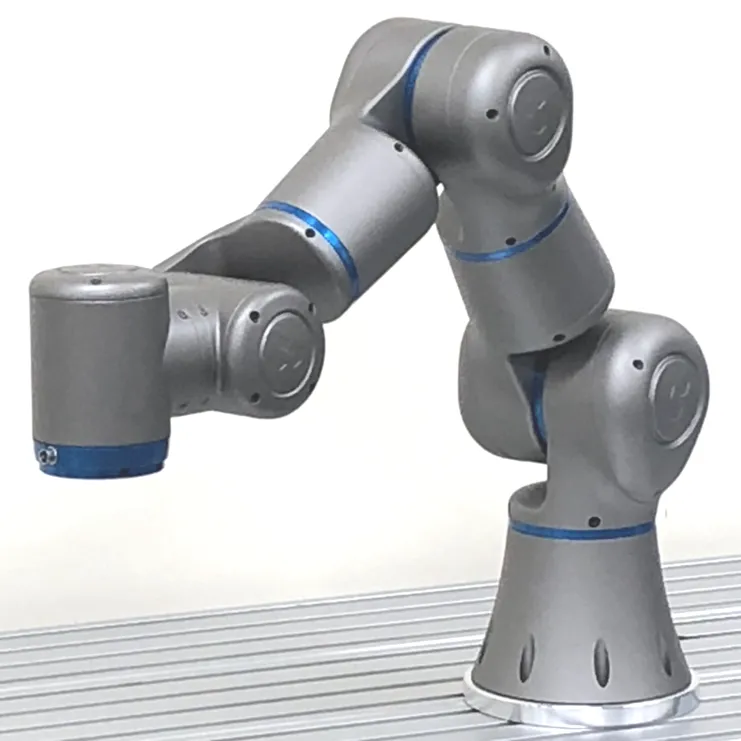
Torobo Arm
Torobo Arm is a robotic arm created to accelerate robotics research. Features include torque sensors on all joints, source code (user interface and servo controller), and linkage with various simulators.

Precise Omni
Precise Omni is an unique high-precision omnidirectional mobile robot. The engagement of the omnidirectional drive gear with the geared floor enables high-speed, high-precision omnidirectional movement without slippage.