Under Development
End Effector
Torobo Hand
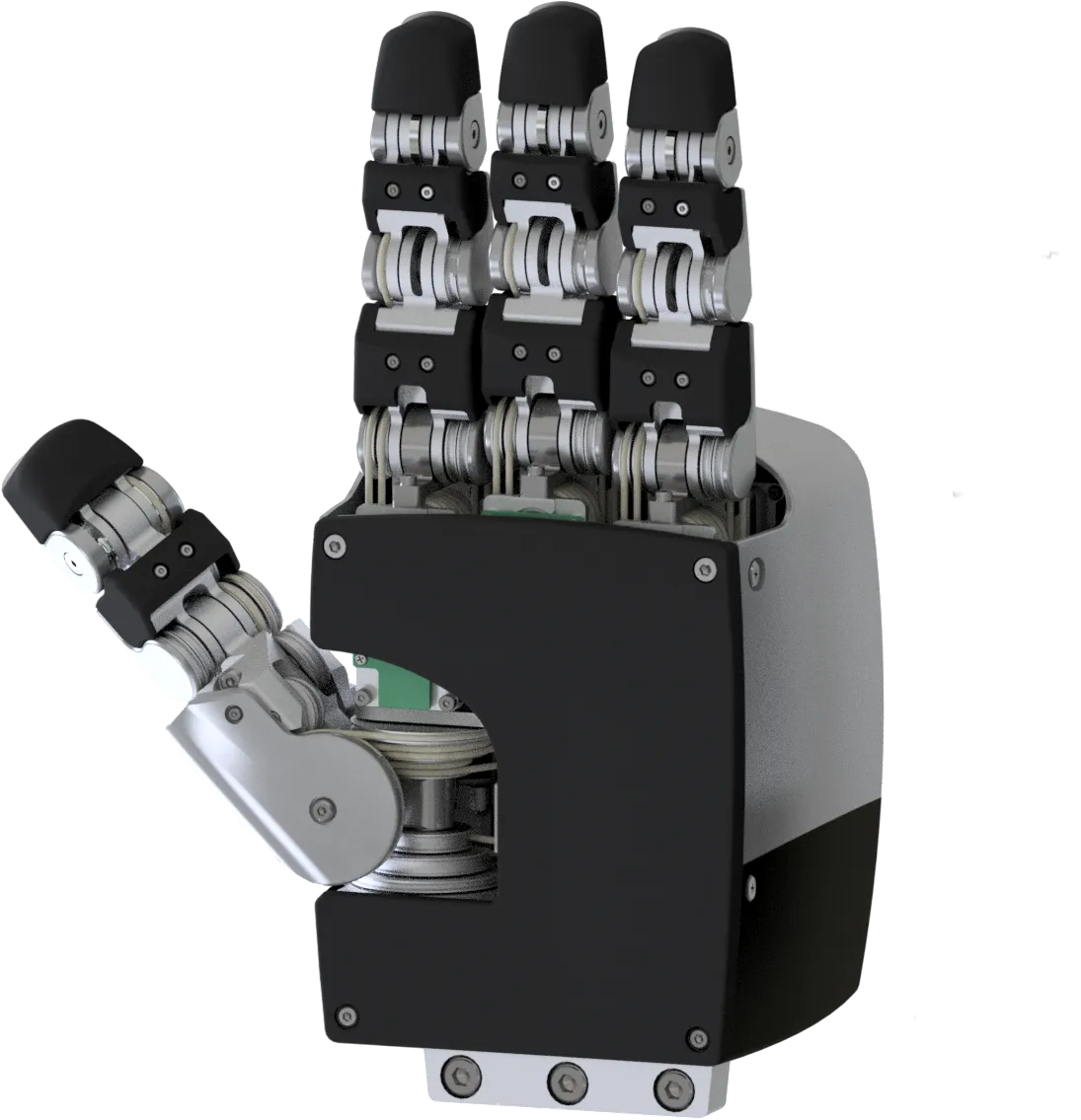
Torobo Hand is a human hand-sized dexterous multi-fingered robotic hand. Offering both dexterity and strength, the hand is ideal for grasping and dexterous object manipulation for a variety of real-world tasks.
Joint Configuration that Enables Dexterous Object Manipulation
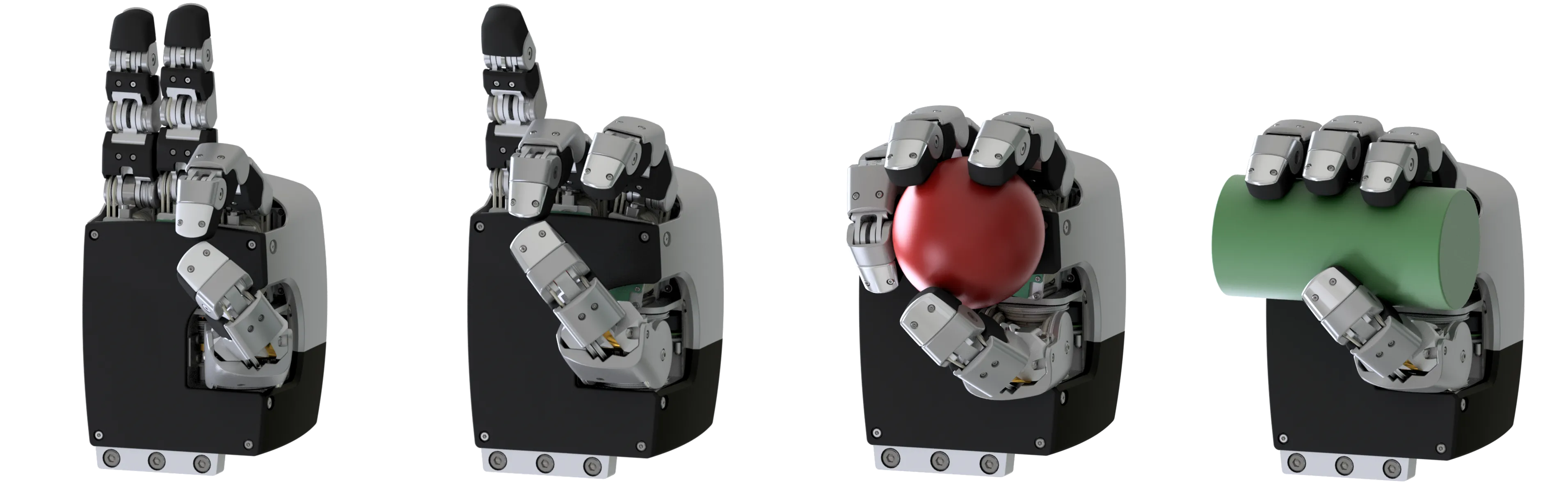
The hand has a joint configuration identical to that of a human hand. This configuration provides sufficient dexterity to replicate key functions of the human hand, enabling not only stable grasping but also dexterous in-hand manipulation. In addition, its size is close to a human-hand and has sufficient output to perform real-world tasks.
Torque Control at Each Joint
Each joint is driven by a backdrivable torque-controlled actuator. By setting torque limits, the fingers can easily adapt to various shapes without prior knowledge, achieving stable grasping.
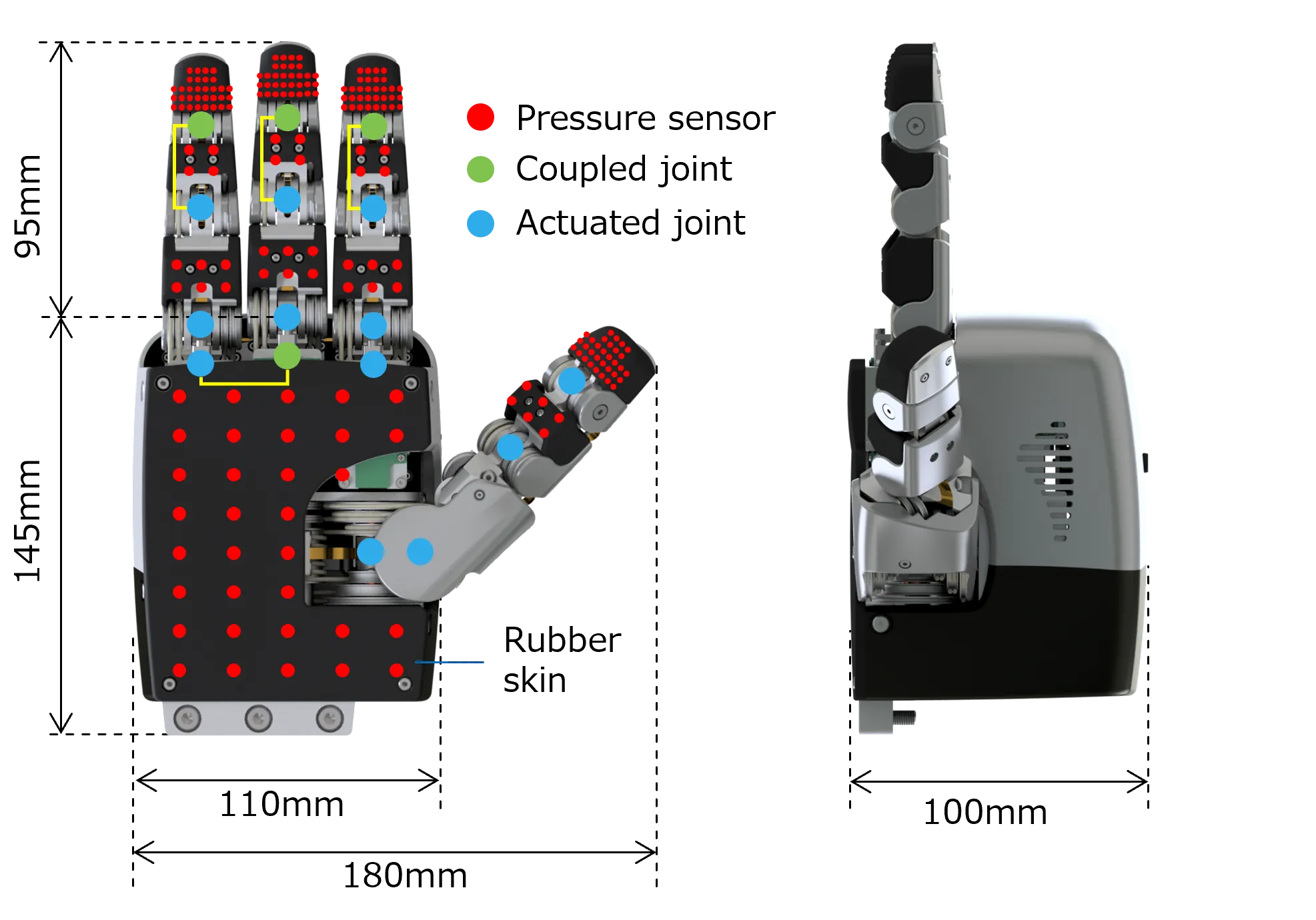
Rich Tactile Feedback from Integrated Pressure Sensors
Distributed pressure sensors are integrated across the finger and palm, with nearly 200 sensing points in total. This rich tactile feedback is collected in real time, making the hand an ideal platform for applied machine learning research.
ROS Compatible
The hand's compatibility with ROS makes it easy to integrate with other robots, sensors, and software. It can be used with Torobo, or with other third-party robot arms using our external controller.
In-Hand Object Rotation by Reinforcement Learning
Torobo Hand was modeled in simulation and the control policy was learned in a few hours using reinforcement learning. As shown in the video, it is possible to execute dexterous operations such as turning an object in the palm of the Hand.
| Specification | Details |
|---|---|
| Joints |
12 actuated joints + 4 coupled joints Thumb: 4 actuated joints Index, Middle finger: 3 actuated joints+ 1 coupled joint Ring finger: 2 actuated joints + 2coupled joints |
| Sensors |
12x 13-bit absolute encoder for joint position
measurement at each actuated joint 197x Pressure Sensor (42 points in each finger, 38 points in the thumb, 33 points in the palm) |
| Grasp force | Approx. 10N at each fingertip |
| Weight | Approx. 2 kg |
| Power supply | 24VDC |
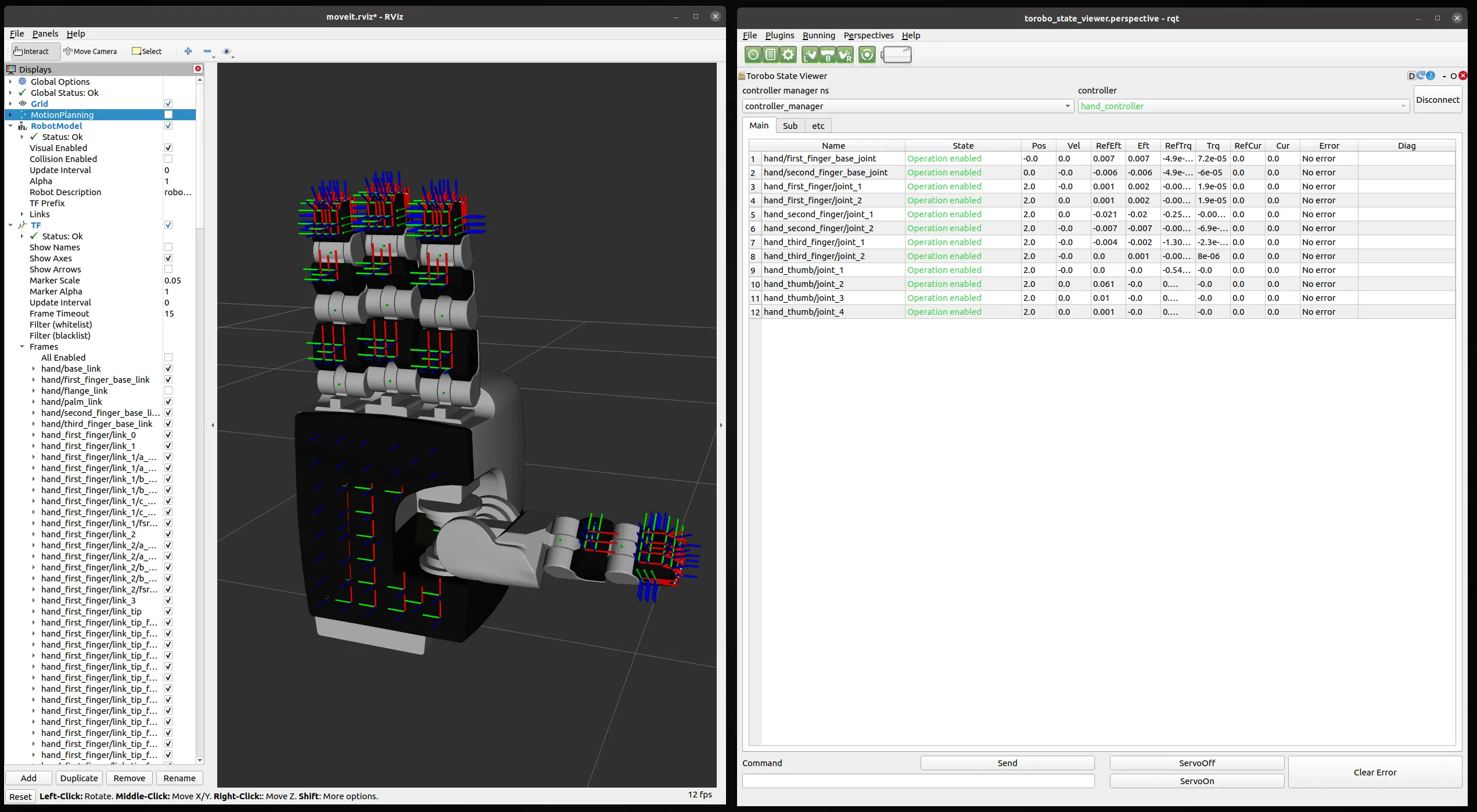
Software
Torobo Hand's software provides basic functions required to fully utilize the dexterity of a multi-fingered hand. It is based on ROS, offering state visualization in Rviz, trajectory planning, and logging of sensor data (joint angle, joint torque, tactile information, etc.). Integration with other ROS-compatible sensors, robots, and software can be done with ease.
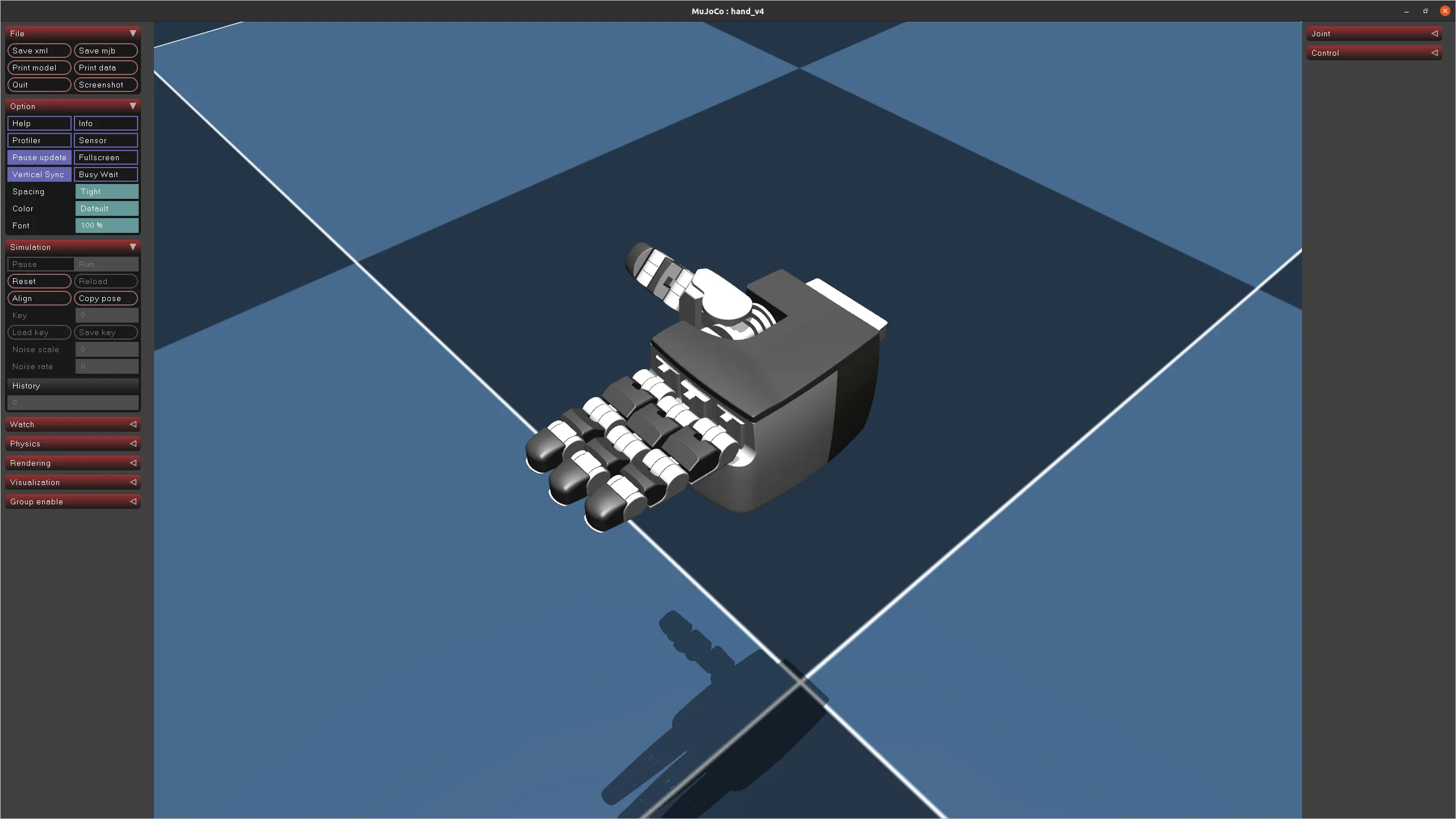
Simulation Model in MuJoCo
The model can be tested in MuJoCo made by Google DeepMind. For detailed usage instructions, please refer to our company blog or GitHub repository.
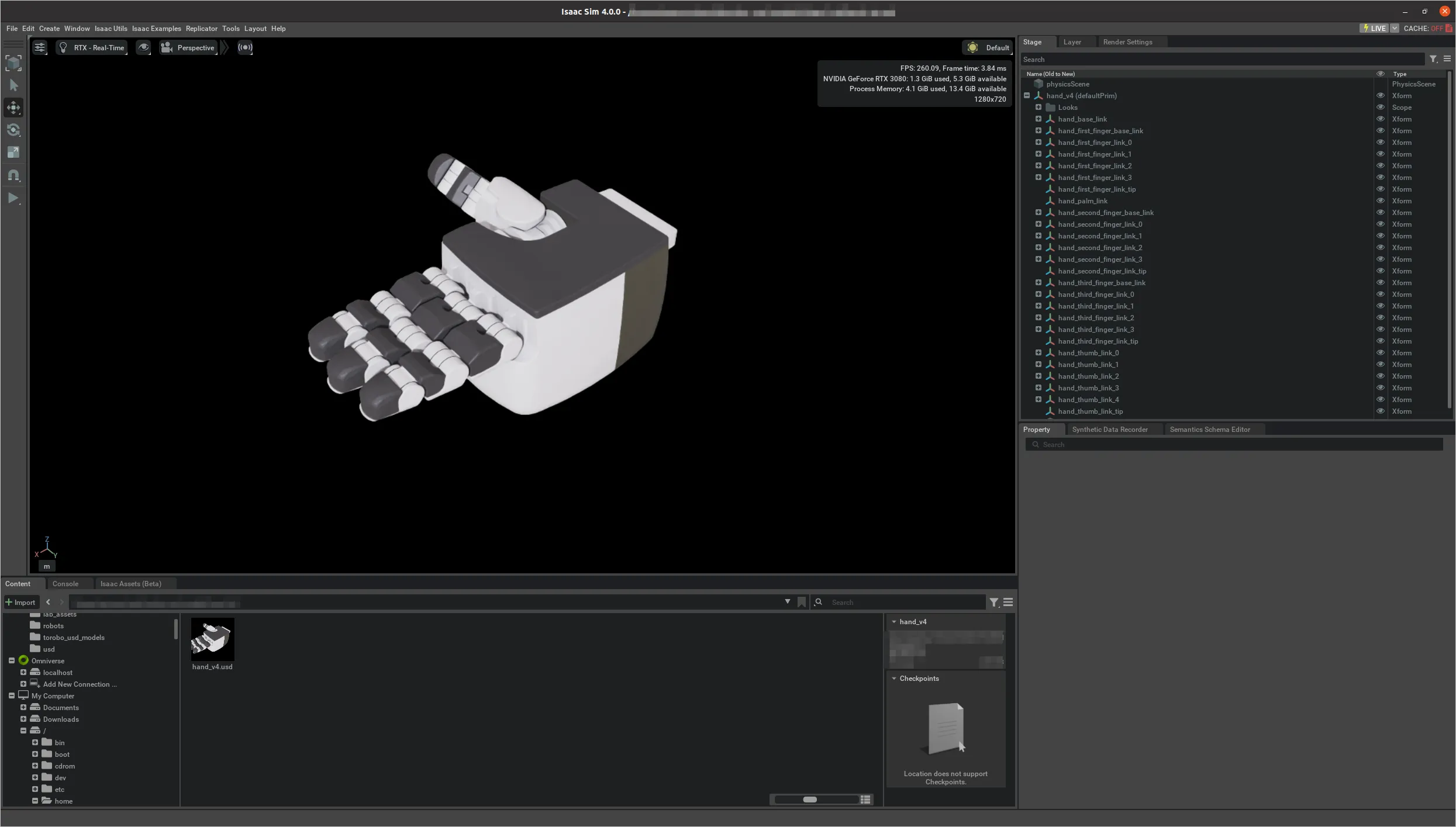
Simulation Model in Isaac Sim
The model can be tested in Isaac Sim made by NVIDIA. For detailed usage instructions, please refer to our company blog or GitHub repository.