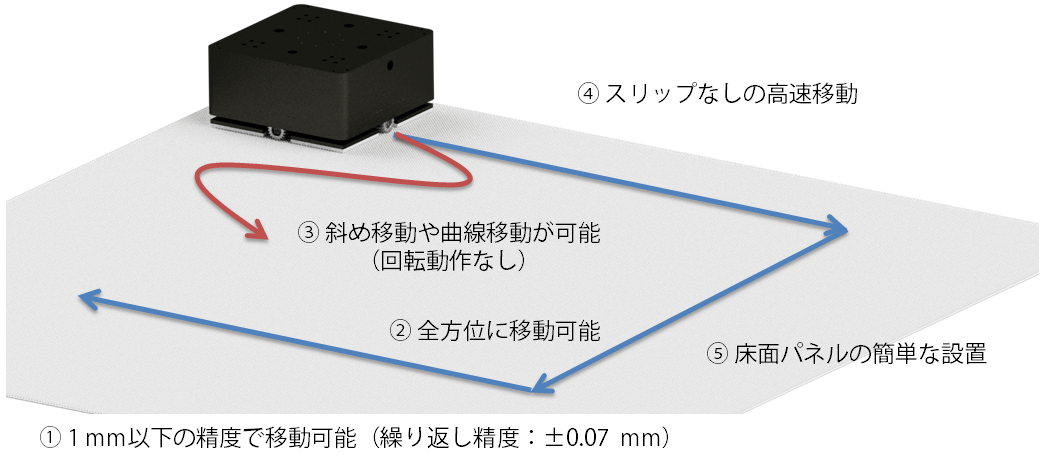
特徴
全方位駆動ギアと歯車状床面との噛み合いにより、スリップせず高速・高精度の全方位移動が可能です。
想定されるアプリケーション
研究室、工場、室内農園等における自動化システム
研究室や工場、室内農園などに使用する移動マニピュレータの足回りとして力を発揮します。通常、レーザスキャナやカメラを用いた自己位置推定にビジュアルサーボを組み合わることで、移動を伴う物体のハンドリングを行いますが、精度や速度に限界があります。Precise Omni はスリップなしの高速移動が可能なため、オープンループで高精度な移動マニピュレーションが可能です。
電波や音波の計測、屋内3Dモデル作成
屋内の電波や音波の計測は、特に多点になるとアンテナの設置などに非常な手間がかかります。Precise Omni はこのような計測をミリメートルレベルで自動化できます。また、屋内測位システムを評価するためのリファレンスや、レーザスキャナを用いた屋内3Dモデルの作成などにも使用できます。
自走式カメラ
自走式カメラなどに使用されるレールは重量があり、直線的な移動しかできません。Precise Omni は敷設が容易でかつ2次元方向にカメラを制御可能なため、より効率的な撮影が可能です。
参考動画
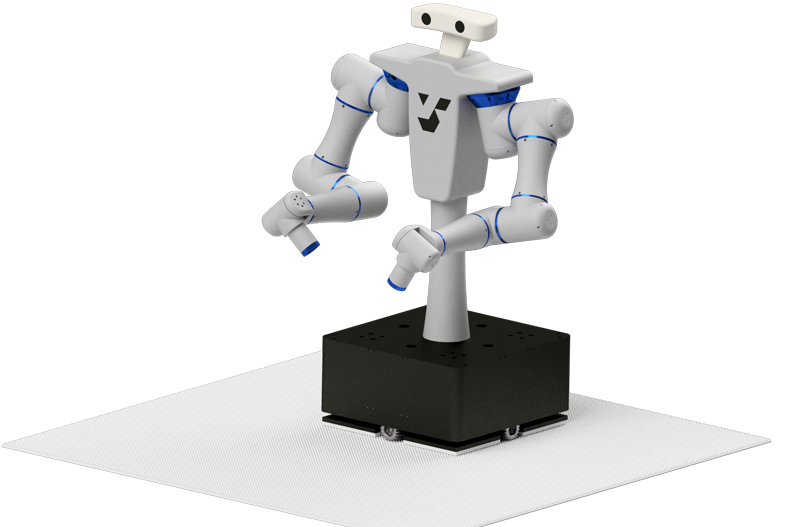
高精度トロボ君
以下のように双腕ロボットを搭載すれば、移動を伴う高精度作業が可能になります。
研究成果
高精度全方位移動ロボットの実運用のための、障害物の画像認識技術およびリアルタイム経路探索技術の開発
関連研究
Precise Omniは、山形大学 多田隈研究室が研究を進めるOmnidirectional Driving Gearに着想を得て開発されました。