開発中
Humanoid operation device
Torobo Puppet

Torobo PuppetはAIの研究開発を加速するヒューマノイド操作インタフェースです。
直感的な操作が可能
Toroboの上半身を、リンク長の比率を保って縮小した形状のPuppetを動かすと、Puppetと同期してToroboが動きます。
作業に合わせた2つの構成
据置型の構成に加えて、操作者が作業中に移動可能な装着型の構成でも使用可能
手先の接触の伝達機能
手先に一定以上の力が加わった際に、操作者に振動で伝える機能があります。
設置型Puppetを用いたダンボール移動
据置型パペットを使用した箱の運搬を示しています。直感的にロボットを操作することで、プログラミングよりも容易にタスクを実行することができます。
| 仕様 | 詳細 |
|---|---|
| Available Joints |
Staition Type: arm : 7 passive joints on each arms torso: 2 passive joints neck: 2 passive joints by tip controller cart: x, y, yaw by tip controller Wearable Type: arm : 7 passive joints on each arms torso: 1 passive joints neck: 2 passive joints by tip controller cart: x, y, yaw by tip controller |
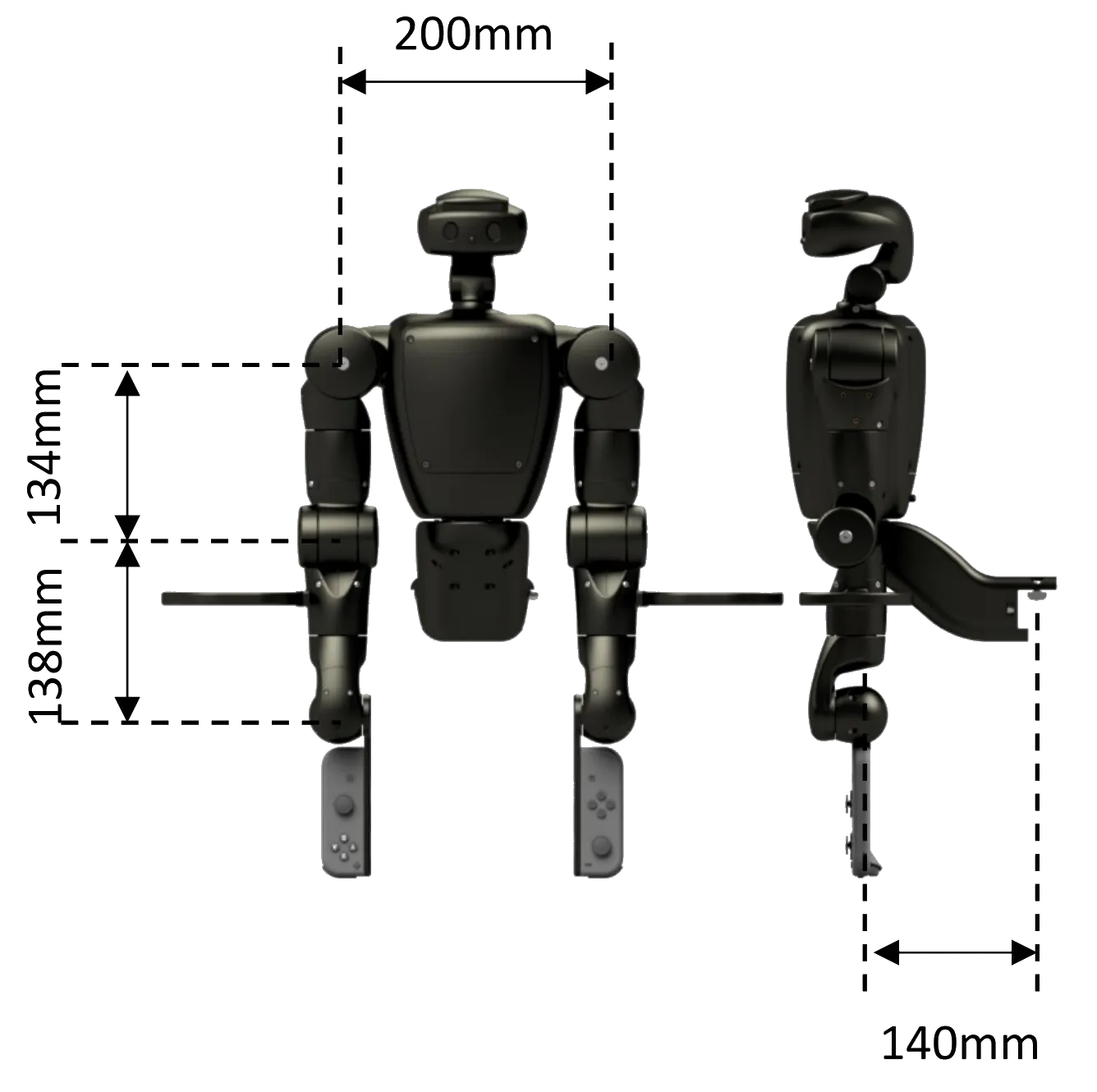
| Size | 1033mm x 790mm x 770mm |
| Weight | Approx. 21 kg when station type, 3 kg when wearable type. |
| Power supply | 100VAC |
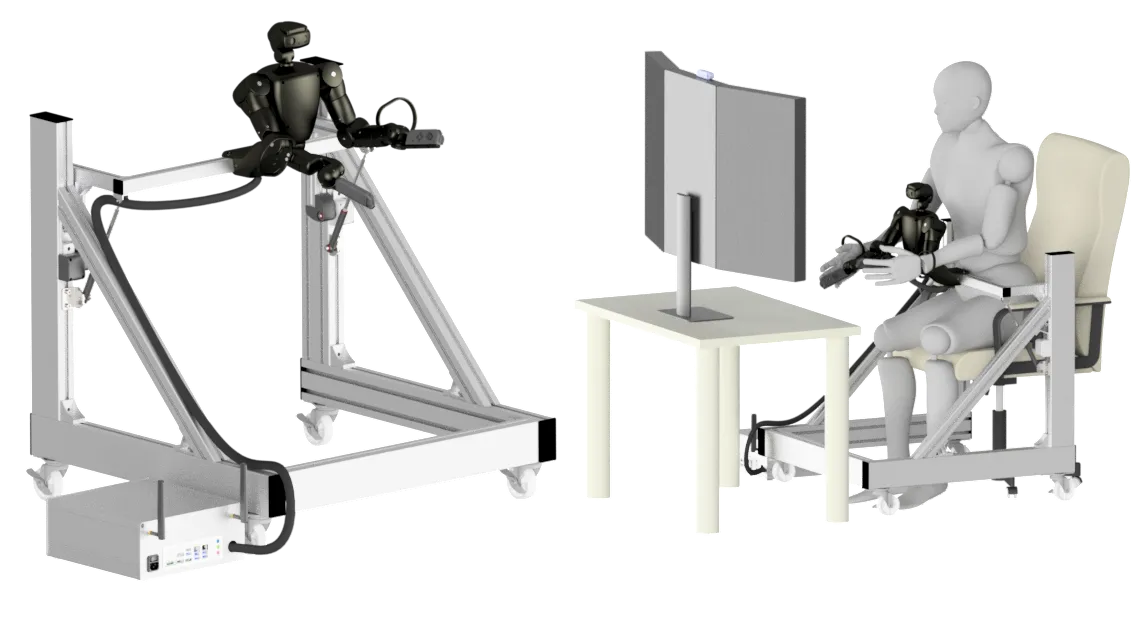
設置型の使用例
設置型は、操作者が椅子に座りつつ、パペットを操作する構成になっています。また、ロボットのTorso/Joint2に対応する軸が設置型の土台に取り付けられており、操作者が腰を屈ませると、ロボットのTorso/Joint2も同期して動きます。
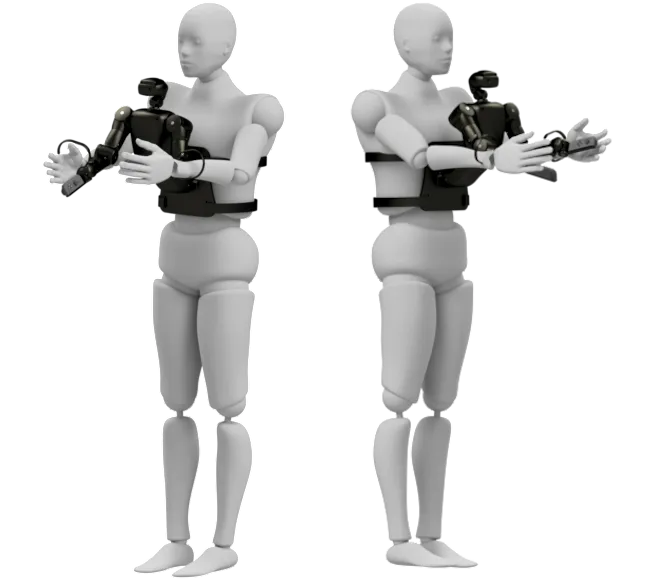
装着型の使用例
装着型は、操作者の体にパペットを装着し、操作する構成になっています。操作者は任意の位置、視点からロボットを見つつ操作することができます。