Legacy Products

Torobo Hand (Four Finger ver.1)
当社が独自開発した世界最小のサイクロイド減速機を使った10軸多指ハンドです。効率の良いサイクロイド減速機を用いることでインピーダンス制御が可能になります。これにより、様々な物体の形状に倣うだけでなく、可動方向における突き指も防止できます。

Togrus
Togrusは移動マニピュレータの手先にカメラを搭載した、汎用の移動監視ロボットです。NTTコミュニケーションズ様との取り組みであるデータセンター遠隔監視ソリューションにおいては、Togrus-DCとして、インターネット越しにサーバーラック内部を確認する作業に活用されました。

Tolon
Tolonは非対称の腕配置と全方位移動台車により、狭い場所でも作業が可能な使いやすい移動マニピュレータです。自律移動と画像認識を組み合わせたマニピュレーションを行う次世代自律ロボットの研究開発や、物流におけるマテハン作業、工場内短距離搬送、警備・見回り等を自動化するロボットアプリケーションの開発に力を発揮します。

Mobile Gripper
Mobile Gripper™は、重量物の短距離搬送やパレタイジング/デパレタイジングを自動化するために開発されたロボットです。左右から箱を挟む方式のため、上部がオープンなプラスチックコンテナも扱えます。

Remote Control Device (Force Feedback Type)
ネットワーク越しに力を伝えるバイラテラル方式の遠隔操作装置です。トルクセンサを備えたロボットとコックピット型の操作装置により、ロボットが感じた力をダイレクトに操作者に伝えることが可能です。これにより、目視だけでは難しい作業を安定して実行できるようになります。

Torobo(トロボ)
Toroboは全身人型ロボットの産業応用を加速するために開発されたロボットです。腕部と腰部の全関節にトルクセンサを装備することで高性能なインピーダンス制御や力制御が可能なため、環境や対象物と積極的な接触を伴うタスクの自動化や、機械学習の応用研究などに活用できます。

Toala
ToalaはToroboの普及版という位置付けのロボットです。Toroboと異なり関節トルクセンサは装備していませんが、電流値(外乱オブザーバ)に基づくトルク検知により接触停止や簡易なインピーダンス制御が可能です。双腕ロボットを活用した自動化をより実用に近い形で検証したいお客様向けです。

Torobo Eye
Torobo Eyeはロボット用ビジョンセンサとして開発された小型・軽量の3次元カメラです。構造化光方式の3次元計測を採用しており、高精細な3次元イメージを取得できます。固定設置だけでなく、移動マニピュレータを含む小型~中型のロボットアームの手先に取り付けた運用にも適しています。

Remote Control Device (Motion Capture Type)
ウェアラブルなモーションキャプチャデバイスと、データグローブもしくはハンドヘルドデバイスを装着することで、遠隔からロボットを制御可能なシステムです。遠隔地からの作業やロボットの学習データを集める目的で使用します。
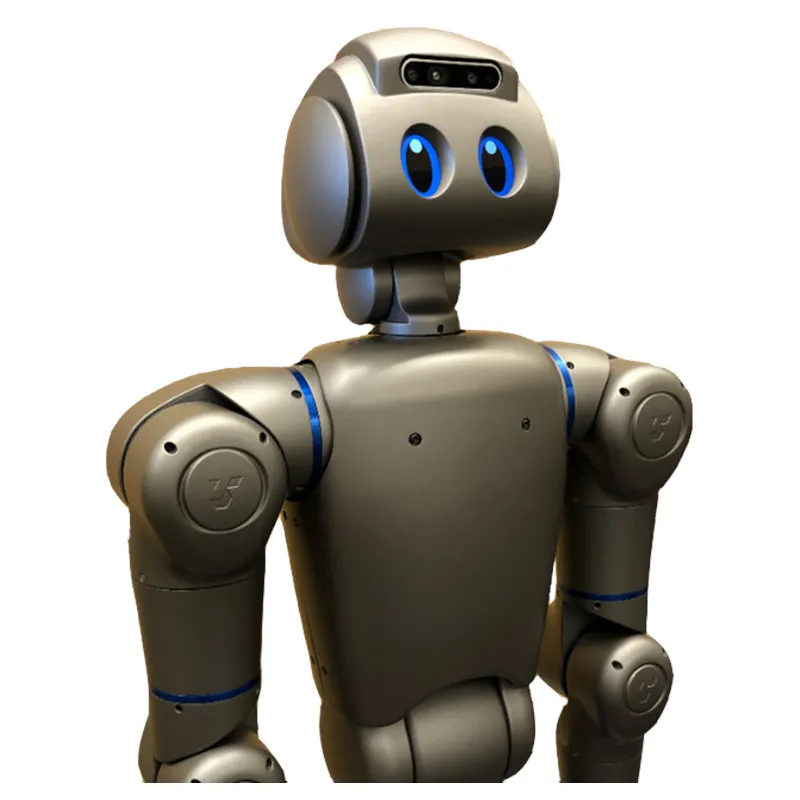
Torobo-kun
Torobo君は、ロボット研究を加速するために生まれた人型ロボットです。6軸の双腕アーム、2軸の腰関節、2軸の首関節からなり、全軸トルクセンサ装備、関節トルク制御可能という特徴があります。オプションで表情表現可能な頭部インタフェースも備え、人間とのインタラクションをより促進することができます。
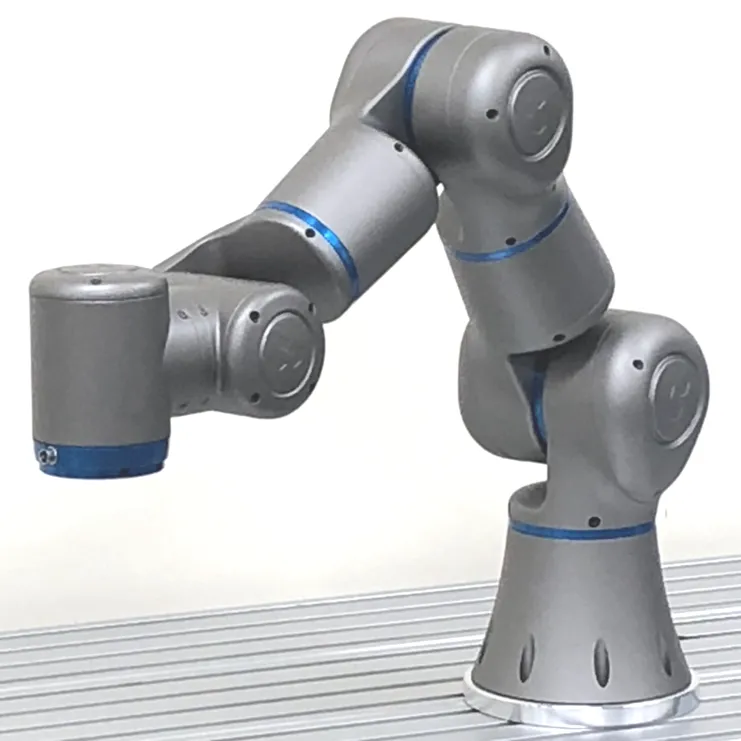
Torobo Arm Mini
Torobo Arm Miniは小型の研究用協働ロボットです。その特徴として、安全性(接触停止)、利便性(小型、軽量、DC24V駆動、直接教示機能)、巧みさ(力制御、インピーダンス制御)を兼ね備えています。
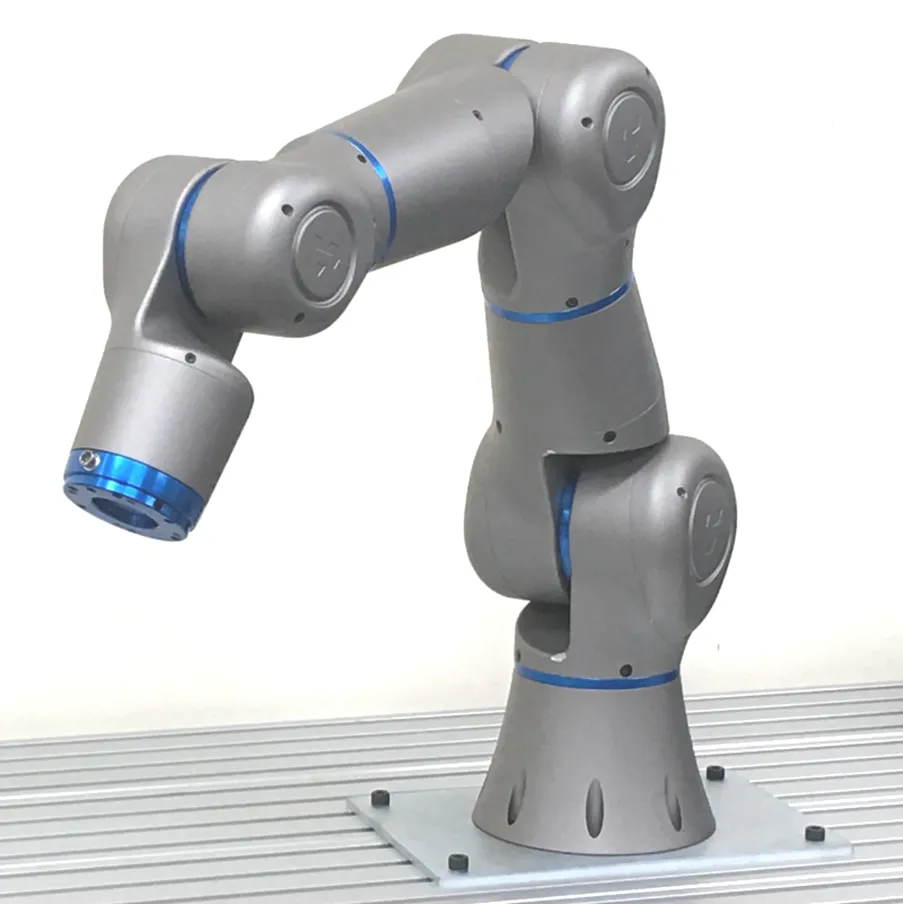
Torobo Arm
Torobo Armは、ロボット研究を加速するために生まれたロボットアームです。全関節トルクセンサ装備、ソースコード(ユーザインタフェース、サーボコントローラ)の提供、各種シミュレータとの連携などの特徴があります

Precise Omni
Precise Omni はこれまでにない高精度全方位移動ロボットです。全方位駆動ギアと歯車状床面との噛み合いにより、スリップせずに高速・高精度の全方位移動が可能です。