開発中
End Effector
Torobo Hand
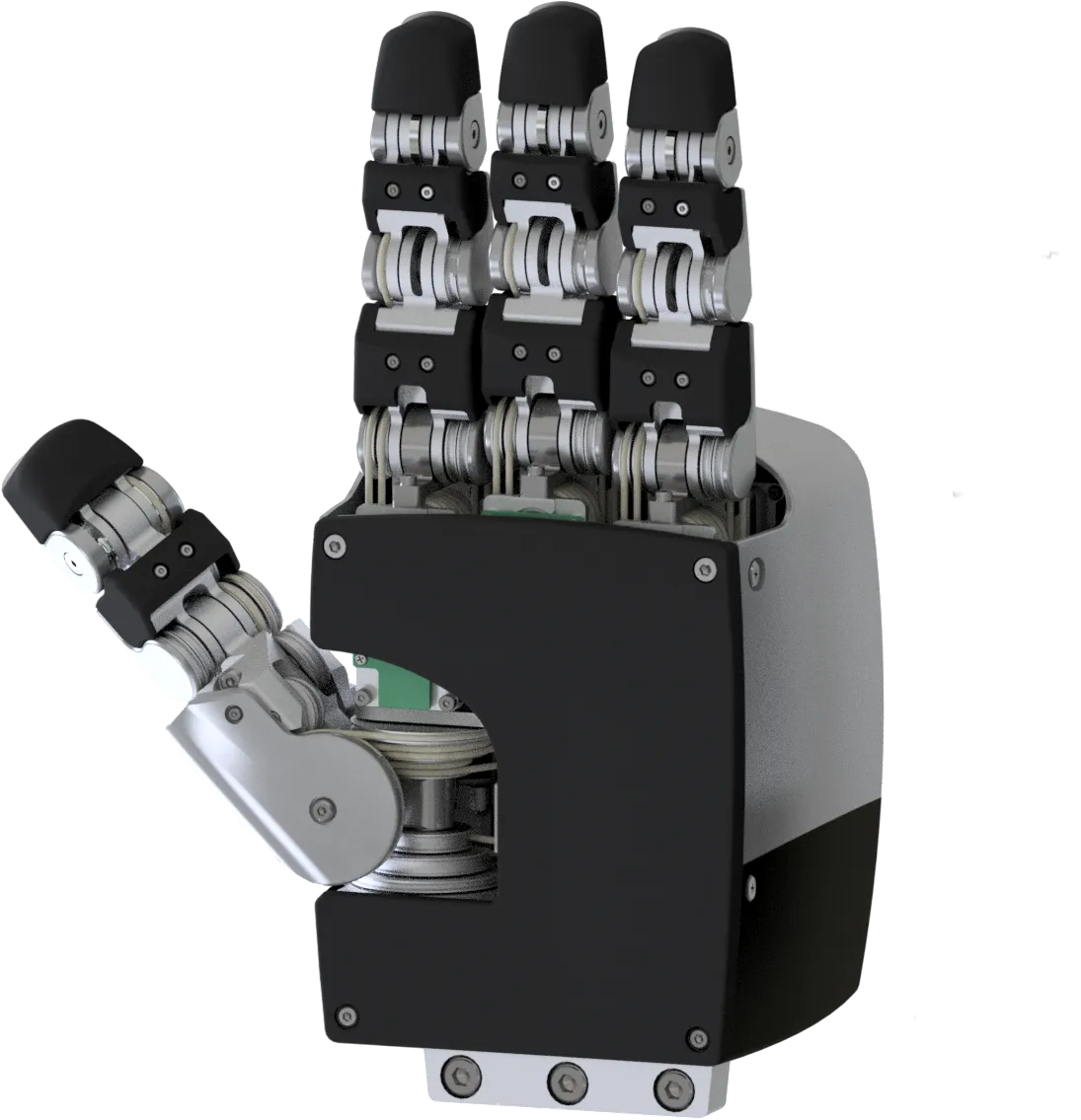
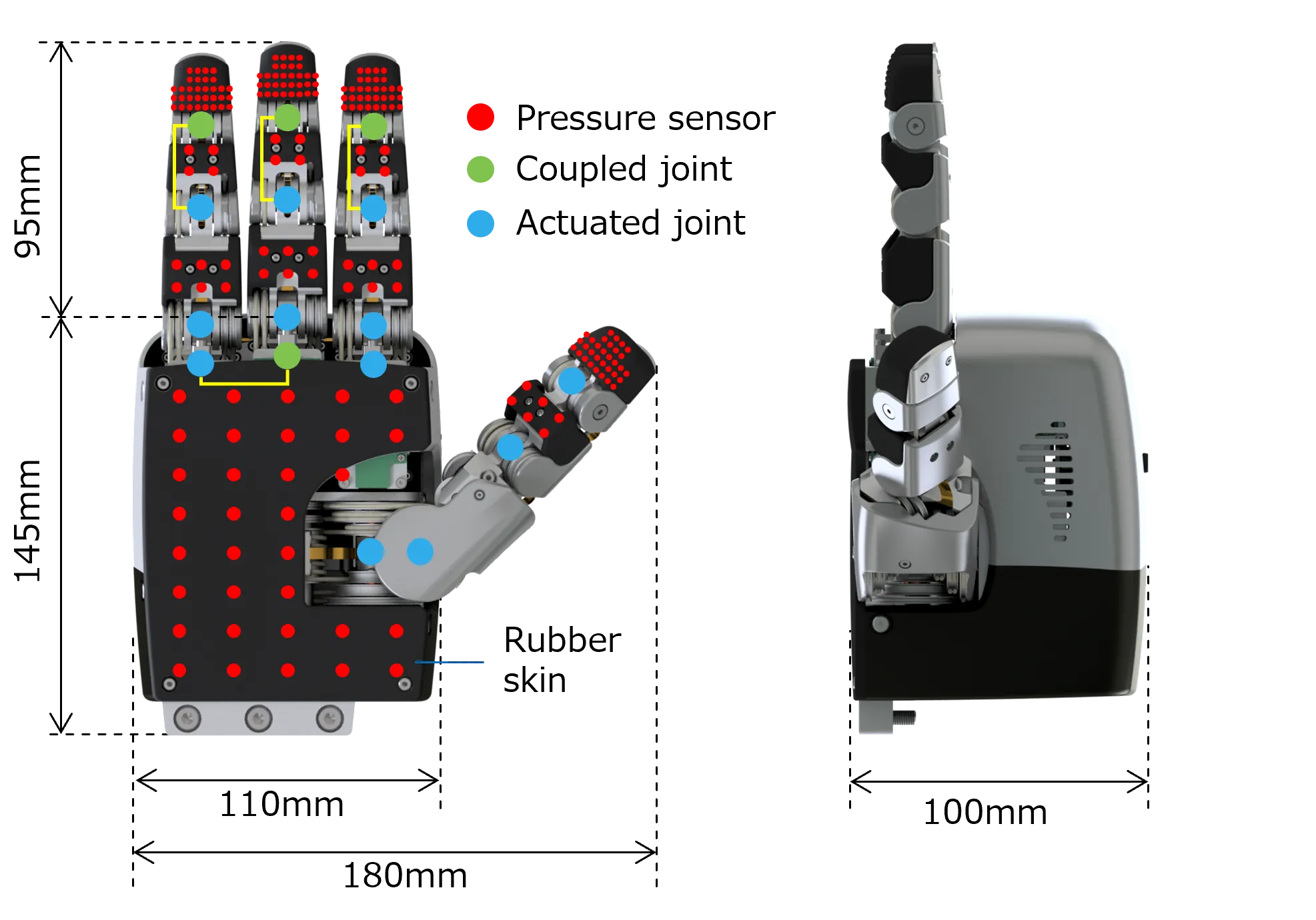
Torobo Handは人の手サイズの器用な多指ロボットハンドです。 巧みさと力強さを両立し、実作業を想定した把持や器用な物体の操りに最適なハンドです。
巧みな物体操作を可能にする関節構成
Torobo Handは、合計16関節を持つ人間の手に近い関節構成のハンドです。人の手の機能を再現するために必要十分な構成で、安定した倣い把持だけではなく、巧みな物体操り(In-hand manipulation)が可能です。また、人に近いサイズと、実作業を行う上で十分な出力を有しています。
トルク制御による柔軟な倣い動作
各関節はバックドライブ可能なトルク制御型のアクチュエータにより駆動されます。トルクを制限することで、未知の形状の物体に対しても、その形状に倣って安定して把持することができます。
充実した触覚情報を提供する分布型圧力センサ
各指と手のひらを覆う皮膚には、片手あたり200点近い分布型の圧力センサが埋め込まれています。これらの圧力センサの値はリアルタイムで取得でき、充実した触覚情報を活用した機械学習の応用研究に最適です。
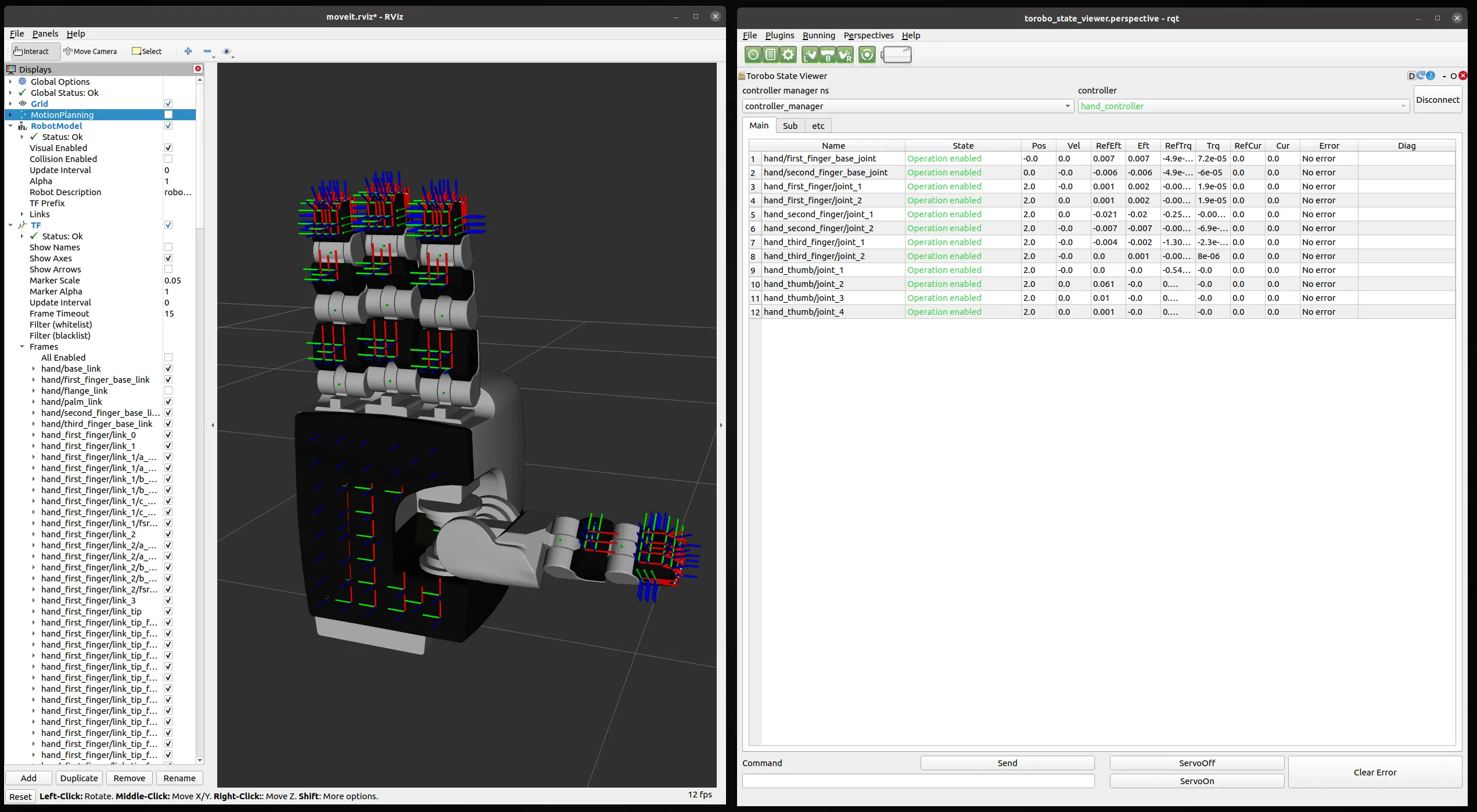
ROS対応
ROSに対応しており、他のロボットやセンサ、ソフトウェアとの統合が容易です。ハードウェアもハンドのみで完結しており、Toroboとの組み合わせはもちろん、外部コントローラを使用して他社製ロボットアームのフランジに接続して使用することもできます。
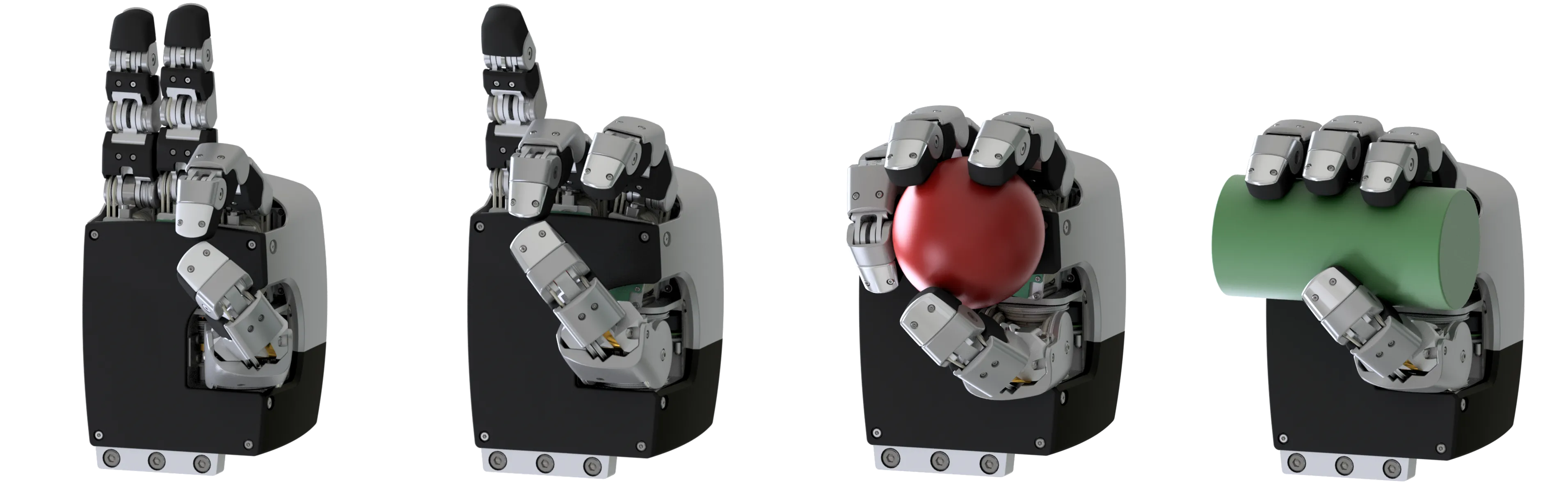
強化学習によるインハンドマニピュレーション
Torobo Handをシミュレーションでモデル化し、強化学習を用いて制御ポリシーを数時間で学習しました。動画のようにハンドの手の平の中で物体を回すような器用な操作を実行することが可能です。
| 仕様 | 詳細 |
|---|---|
| Joints |
12 actuated joints + 4 coupled joints Thumb: 4 actuated joints Index, Middle finger: 3 actuated joints+ 1 coupled joint Ring finger: 2 actuated joints + 2coupled joints |
| Sensors |
12x 13-bit absolute encoder for joint position
measurement at each actuated joint 197x Pressure Sensor (42 points in each finger, 38 points in the thumb, 33 points in the palm) |
| Grasp force | Approx. 10N at each fingertip |
| Weight | Approx. 2 kg |
| Power supply | 24VDC |
ソフトウェア
自由度の多い多指ハンドを自在に扱うために必要な基本的な機能が、あらかじめ実装されています。Torobo HandのソフトウェアはROSをベースに作成されています。そのためRVizでの状態可視化、軌道計画、センサ情報(関節角度、関節トルク、触覚情報など)のログ取得や保存が可能です。ROSに対応した他のセンサやロボット、ソフトウェアとの統合が容易です。