
ハードウェア
アクチュエーター開発からロボット全体設計・製造、基板設計・実装などハードウェアを1から構築しています。
アクチュエーター開発からロボット全体設計・製造、基板設計・実装などハードウェアを1から構築しています。
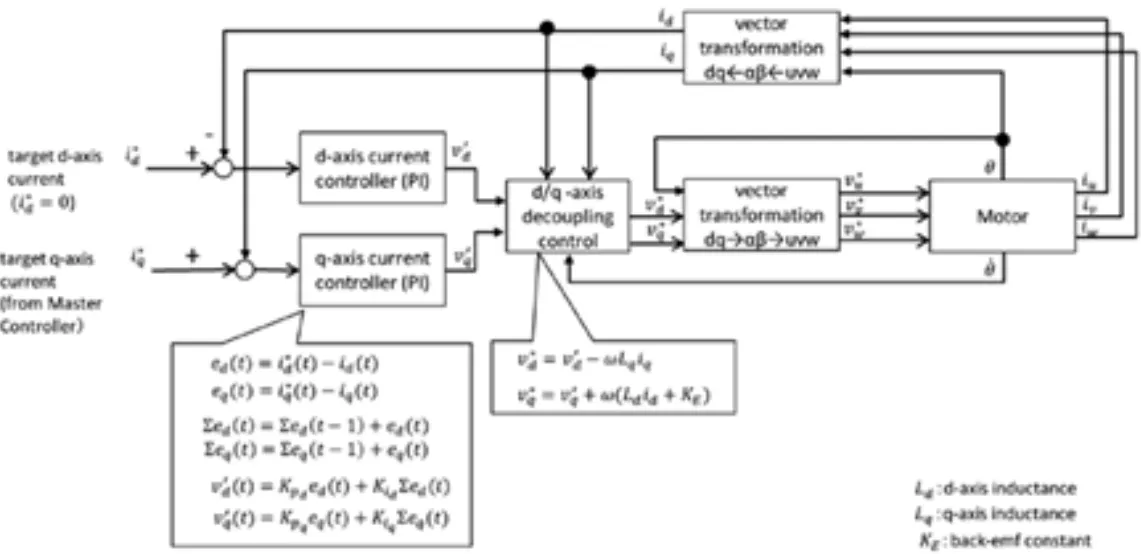
低レイヤーのモーターコントロール技術およびEtherCAT等の通信技術を自社で開発しています。
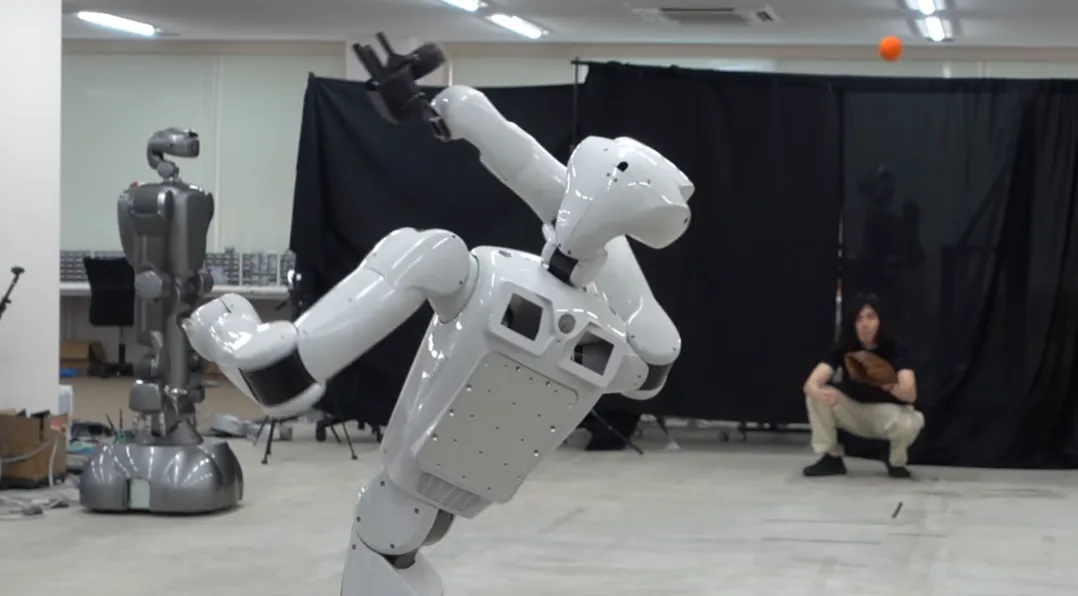
軌道計画や力制御、全身を使った制御技術のノウハウがあり、お客様のニーズに合わせて使い分けることができます。
アルゴリズムベースからマルチモーダル生成AIまで幅広く使い分けることにより、お客様の要望に応じたアルゴリズムを提案します。
生成AIと力制御人型ロボットによる自動化ソリューション
過去に実施したソリューション(PoCを含む)

Torobo GTCは移動マニピュレータを用いて棚からカゴ車等へ物品を搬送するシステムです。物品を直接ピッキング可能かつピッキングステーションが不要なため、生産性と保管効率を両立できます。
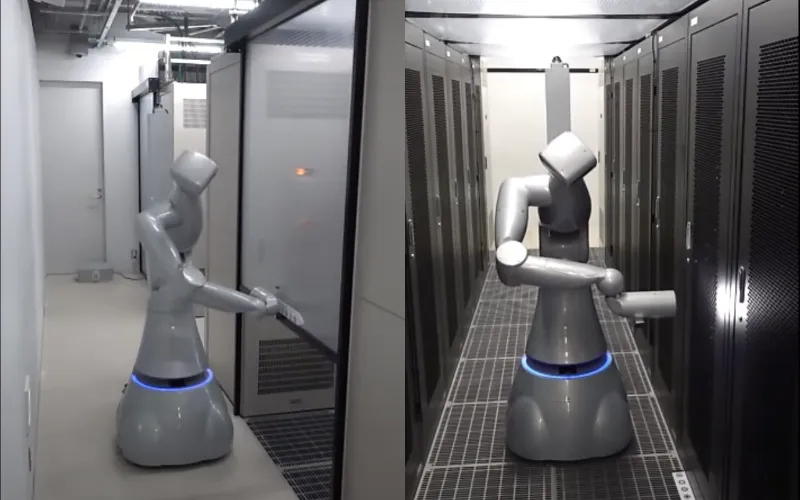
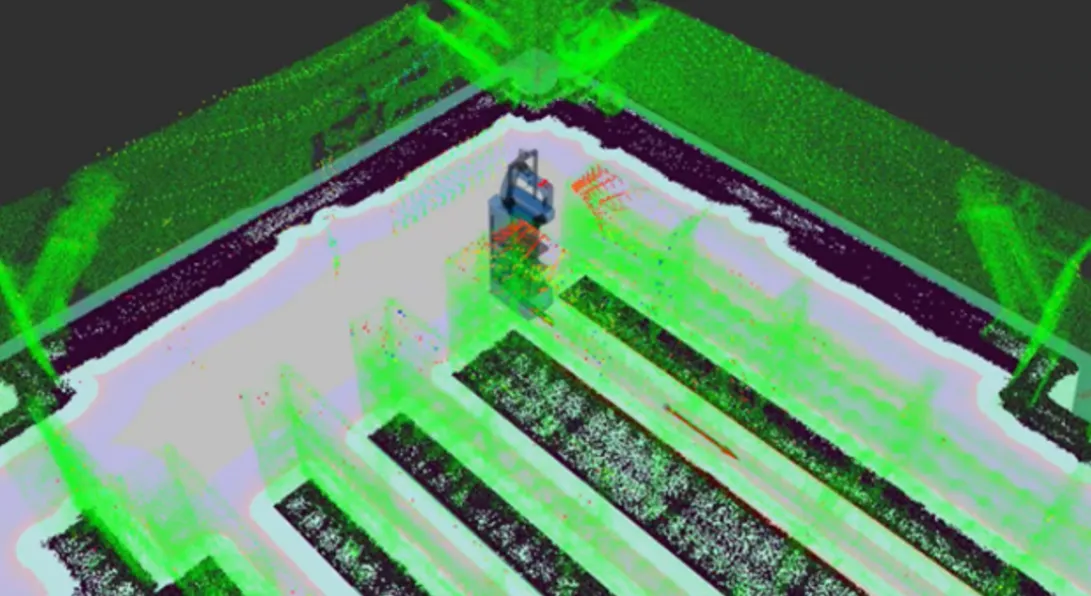
移動マニピュレータを用いたデータセンター向けの遠隔監視ソリューションです。インターネット越しに手先カメラの6軸姿勢を制御できるため、機器の状態を遠隔から入念に確認することができます。

Mobile Gripper™を用いて、重量物の短距離搬送やパレタイジング/デパレタイジングを自動化します。大型のマテハンロボットが設置できない小規模~中規模の物流施設や工場での使用に適しています。
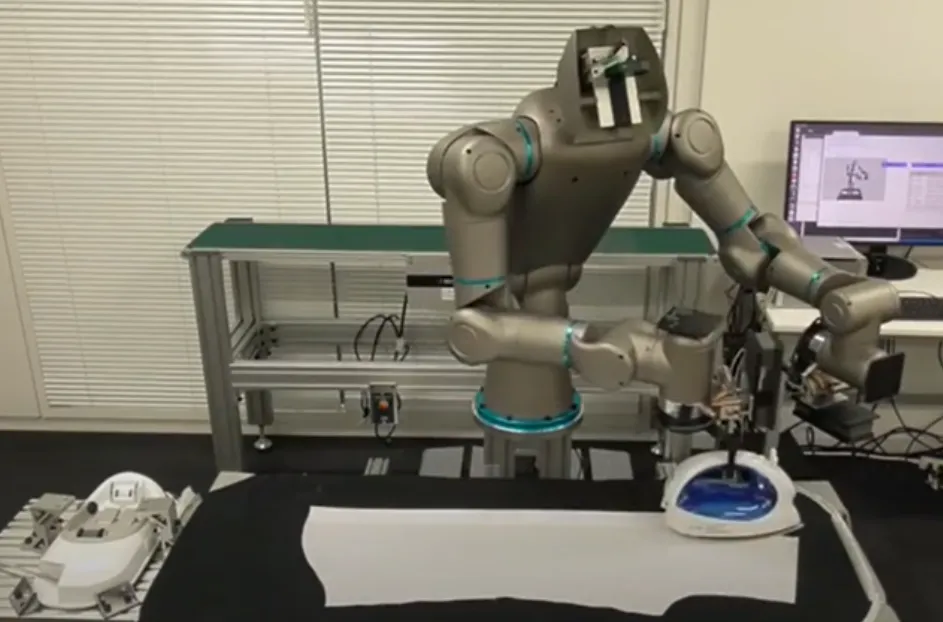
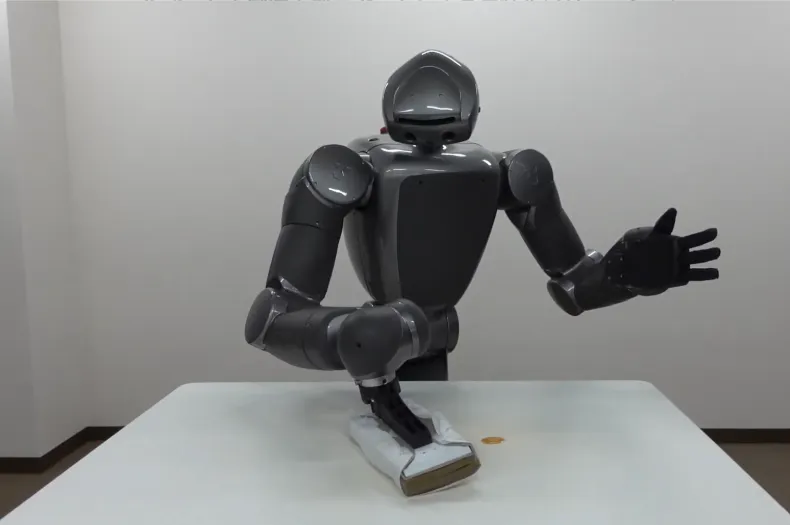
双腕ロボットを用いて、縫製工程の一部である生地の折りたたみ作業の自動化に取り組みました。実際のYシャツ生地に対し、画像認識とモーションプランニングを組み合わせて、折りたたみとアイロンがけの作業を実施しました。その成果として、特許もお客様と共同で出願しました。
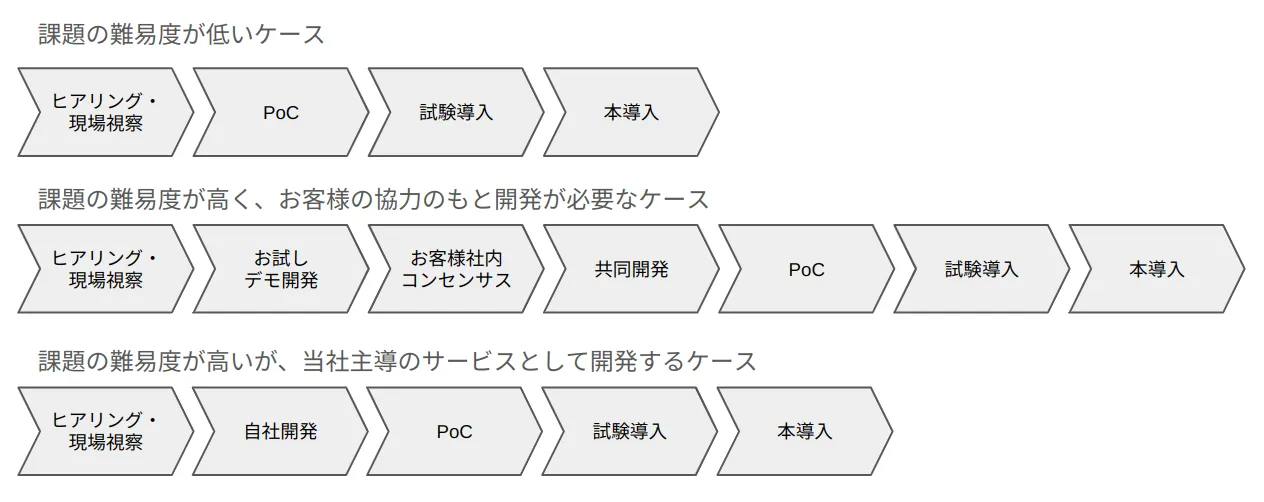
ソリューションの進め方
基本的な流れとしては、最初にヒアリングと現場を視察を行い、課題を抽出いたします。その上で、PoC(現場実証)を実施し、その結果に基づき試験導入および本導入に進みます。お客様が抱える課題の難易度や決裁プロセスに応じて、以下に示すような複数のケースに対応いたします。
ロボットを知り尽くしたエンジニアがお客様に寄り添い、カリキュラムの提案からレクチャーまで一貫して行います。それにより、お客様のロボットプロジェクト立ち上げの時間を大幅に短縮します。また、「自動化をしたいが何から手を付けたらよいか分からない」というお客様に対するロードマップの作成支援や、「人型ロボットを何かに適用したいが皆目見当がつかない」などの漠然とした悩みに対するアドバイスも実施いたします。

当社ロボットを購入いただいた後、ROSの操作方法のトレーニングから実際にお客様社内でデモや導入を行うまでのカリキュラムを作成し、毎月の技術指導を実施しています。

現場視察の上、中長期的な視点でロボットを導入していくための計画を共同で策定すると同時に、顧客社内でロボットリテラシーを向上させるための技術相談も実施しています。
ロボット開発のエキスパートが御社の開発の協力をいたします。弊社は創業以来人型ロボットに限らず、多種多様なロボットを構築してきました。ロボット製造に必要なHW/SWの技術基盤が揃っているため新しいロボットを素早く構築することが可能です。
